MATLAB仿真实战:一阶倒立摆控制系统设计与调试指南
版权申诉
MATLAB仿真软件的使用方法及控制系统的调试方法文档深入介绍了如何在控制科学与工程的学习过程中,利用MATLAB这一强大的工具进行实践操作。该课程的核心目标是帮助学生通过一阶倒立摆系统来理解和应用控制理论。
首先,倒立摆系统是一个非线性、强耦合且多变量的不稳定系统,它被选作教学实验设备,有助于直观展示控制系统的关键概念。学生需学习如何设计控制器,如经典的PID控制器和现代的最优控制,这涉及到控制理论的深入理解,如稳定性、可控性和系统性能的优化。
在实验设备方面,设计使用了GIP-100-L型一阶倒立摆,它由计算机、运动控制卡、伺服机构、摆杆和光电码盘构成一个闭环系统。通过光电码盘的反馈,实时监控小车的位置、速度和摆杆的角度、角速度,然后计算机基于这些数据进行控制决策,确保摆杆保持平衡。
设计内容分为三个部分:首先,学生需要建立一阶倒立摆的线性化数学模型,这是基于控制理论的基础,通过实际推导,将复杂的非线性模型简化为便于分析的线性模型。其次,重点是PID控制器的设计,包括MATLAB仿真实验,通过这个环节,学生可以模拟并优化控制策略,验证理论知识在实际环境中的效果。最后,课程还涉及最优控制器设计,尽管PID控制器在实际应用中广泛,但这里也会探讨如何利用现代控制理论设计更高效的控制器,并通过MATLAB进行仿真和实体调试。
通过MATLAB的仿真,学生不仅可以掌握控制器设计的步骤,还能学会如何处理实验数据,分析系统动态响应,以及如何通过调整参数优化控制性能。这种理论与实践相结合的方法,有助于提升学生的理论素养和动手能力,让他们能够更好地理解和运用控制系统的原理和技术。
MATLAB在控制系统的仿真和调试中扮演着关键角色,它提供了一个安全而直观的平台,让学生能在虚拟环境中检验和优化他们的控制策略,从而加深对控制理论的实际应用理解。通过一阶倒立摆项目的实施,学生不仅能掌握MATLAB的基本操作,还能提升解决实际问题的能力,为未来在控制工程领域发展打下坚实的基础。
Http://www.aybook.cn [俺要电子书] 更多文档资料请访问本站
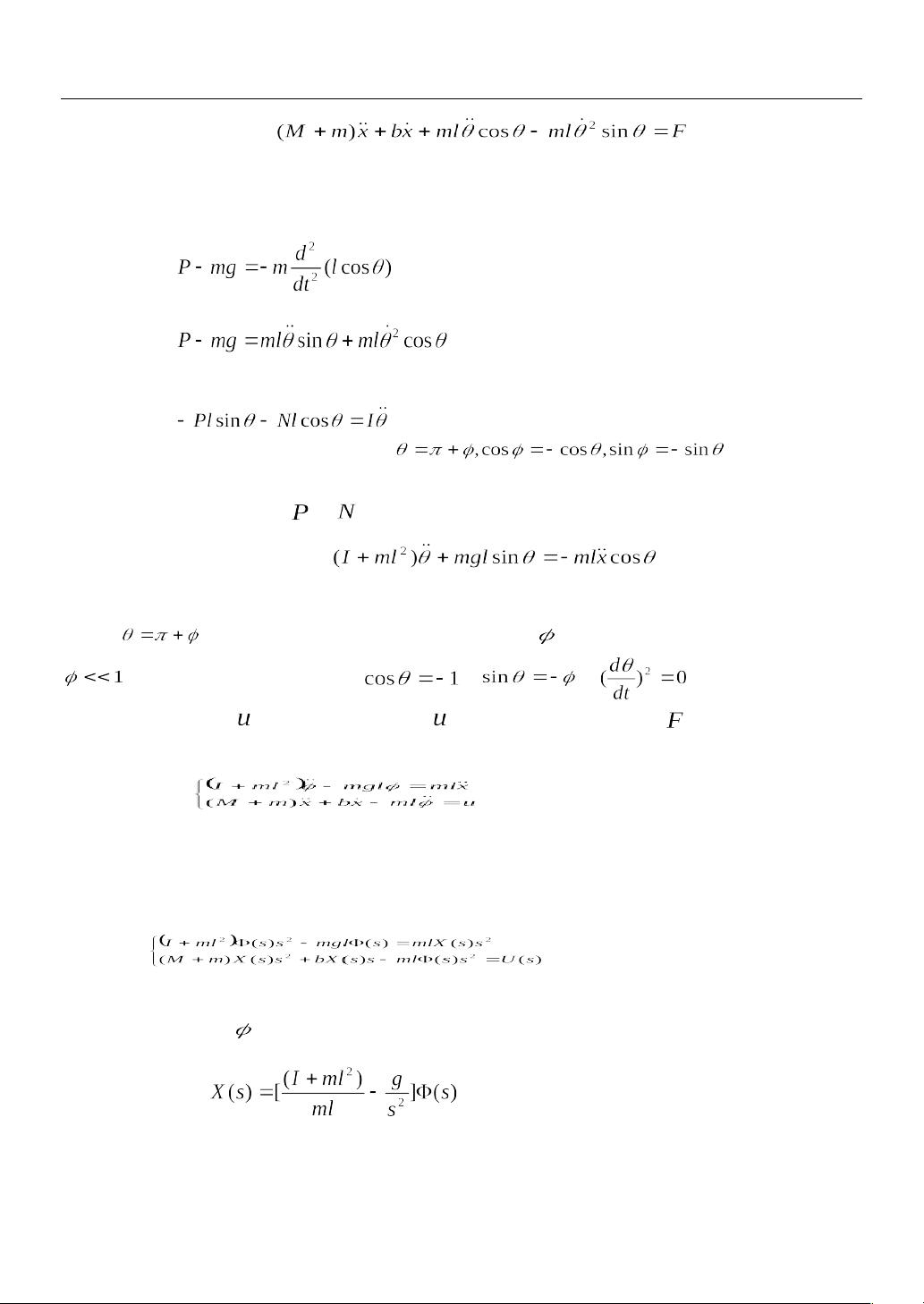
(2-1)
为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得到下面方
程:
即:
力矩平衡方程如下:
注意:此方程中力矩的方向,由于 ,故等式前面有
负号。
合并这两个方程,约去 和 ,得到第二个运动方程:
(2-2)
1.微分方程模型
设 ,当摆杆与垂直向上方向之间的夹角 与 1(单位是弧度)相比很小,即
时,则可以进行近似处理: , , 。为了与控制理论的
表达习惯相统一,即 一般表示控制量,用 来代表被控对象的输入力 ,线性化后得到该系
统数学模型的微分方程表达式:
(2-3)
2.传递函数模型
对方程组(2-3)进行拉普拉斯变换,得到
(2-4)
注意:推导传递函数时假设初始条件为 0。
由于输出为角度 ,求解方程组(2-4)的第一个方程,可以得到
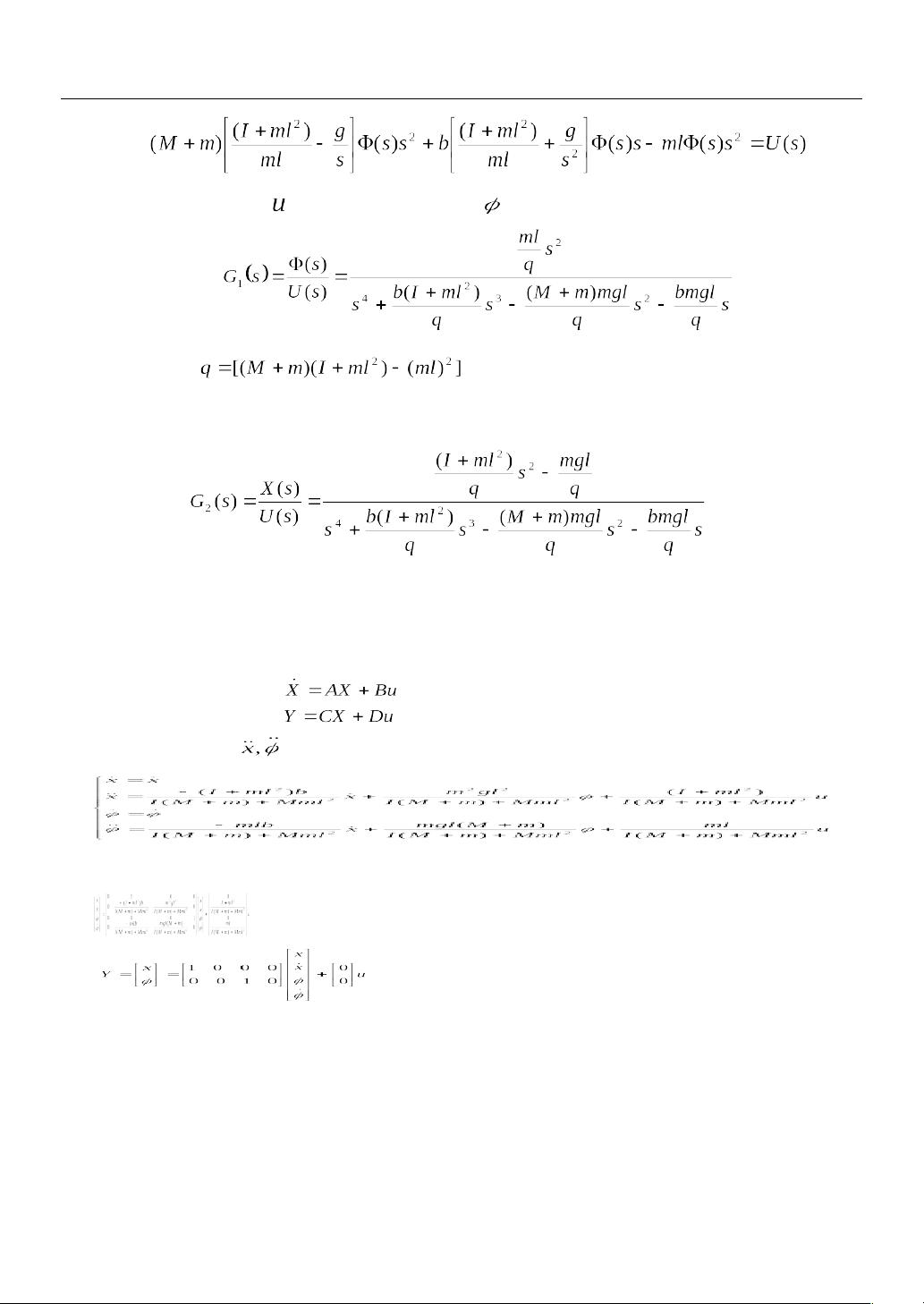
把上式代入方程组(2-4)的第二个方程,得到
Http://www.aybook.cn [俺要电子书] 更多文档资料请访问本站
剩余43页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-01-19 上传
2022-10-20 上传
2022-12-03 上传
2021-09-29 上传
2023-04-19 上传
2021-07-06 上传

老帽爬新坡
- 粉丝: 96
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Flash Crates-crx插件
- ist的matlab代码-uebung_3_2:第3章练习2(“客户折扣”)
- 海康相机二次开发测试,串口,基于正则表达式的过滤规则,C#写日志文件,TCP客户端实现
- JMeter的简单使用步骤.rar
- The Chorderator Chord Generator-开源
- 出租车预约服务网站模板
- 击球_robocup_高尔夫_机器人_
- CD-EW8051-7601.rar
- fundamentals_csharp:做C#基础知识(sem POO)
- Super Mario Maker 2 Bookmark-crx插件
- LeviatorWorldsSimulator
- 用matlab求伪Wigner-Ville分布.rar_Wigner-Ville 分布_Wigner-Ville分布_matla
- source code t2_ns2_vanet_
- graphql:这是graphQL如何在本地主机中工作的一个小示例
- Select:一组DataTables库的选择API方法和按钮
- java-interpreter
