单腿跳跃机器人仿真:阻抗控制与跳跃高度优化
需积分: 0 100 浏览量
更新于2024-08-05
1
收藏 668KB PDF 举报
"该资源是关于单腿跳跃机器人的仿真设计,主要利用webots2019b软件进行,借鉴了Marc Raibert的‘legged robots that balance’中的理论。设计中,机器人模型包括一个高0.1m,直径0.6m,重15kg的机身,腿的最大长度为1.2m,初始长度0.8m,直径0.02m,质量1kg。控制策略采用了阻抗控制方法,通过弹簧倒立摆模型来控制跳跃高度。"
单腿跳跃机器人的仿真设计涉及到多个关键知识点:
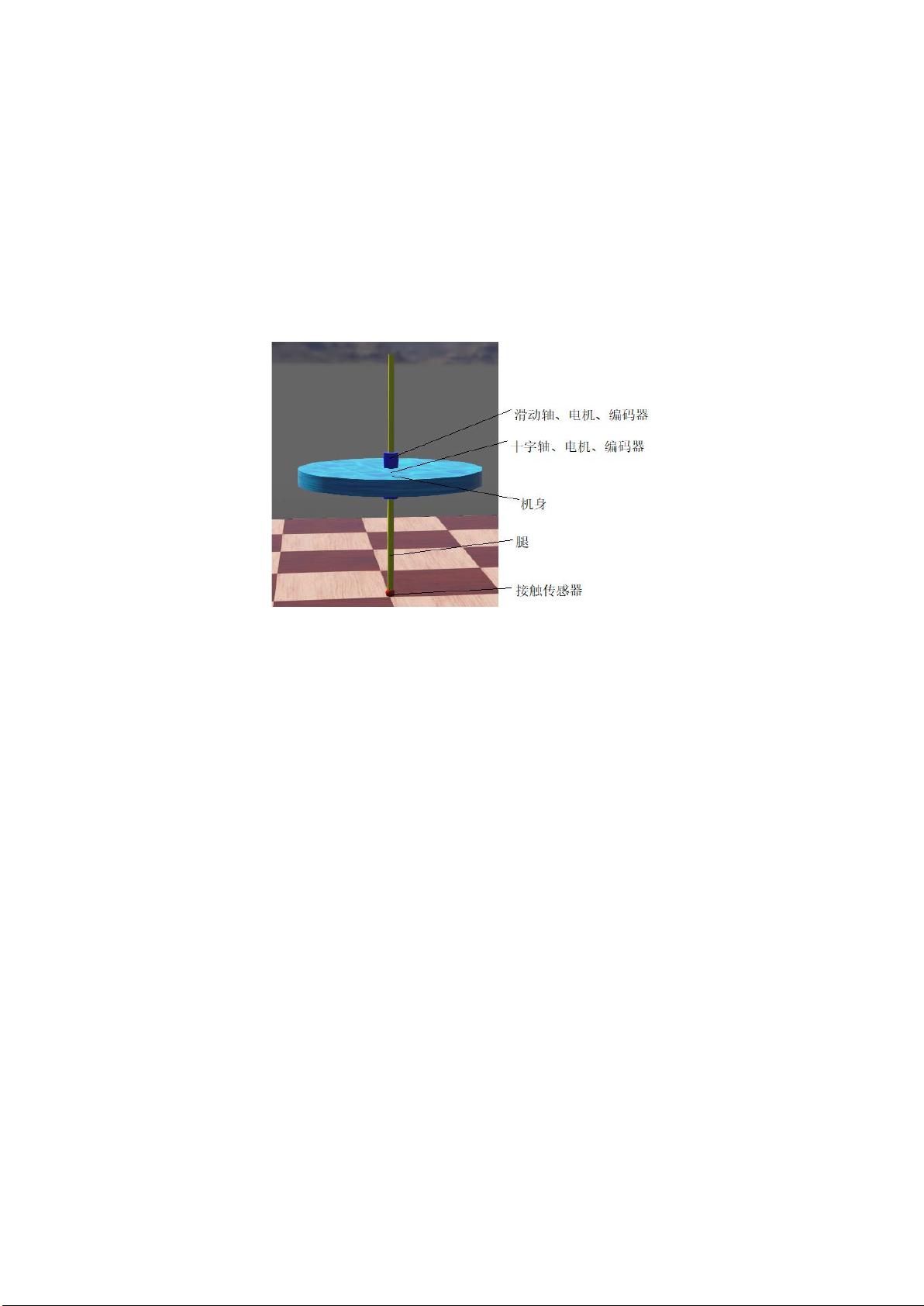
1. **模型构建**:机器人模型被设计为一个具有弹簧性质的倒立摆,模拟腿部功能。机身和腿部的质量、尺寸等参数被精确设定,以反映真实世界的物理特性。滑动轴的摩擦系数和阻尼用来模拟能量损耗。
2. **控制系统**:控制目标是使机器人能够稳定地跳跃,包括跨越台阶和障碍物,并在外部干扰下保持稳定。控制系统将跳跃、前进速度和身体姿态视为独立的控制问题。
3. **跳跃高度控制**:采用了阻抗控制策略。阻尼控制方法是通过监测虚拟弹簧的伸长量来计算直线电机施加在滑动关节上的力Fs。弹簧的伸缩模拟了机器人的弹跳运动,其刚度影响着机器人的跳跃频率。为了维持跳跃高度,需要在弹簧伸展阶段(THRUST相)施加推力Fthrust以补偿能量损失。
4. **能量管理**:能量转换过程中的损耗,如阻尼、摩擦和碰撞,会导致系统能量减少,跳跃高度降低,最终可能导致系统失稳。推力Fthrust的计算是一个关键问题,理论上可以通过能量差除以时间来估算,但实际上,推力与跳跃高度的关系复杂,需要通过实验标定来确定。
5. **推力与跳跃高度关系**:推力和跳跃高度之间的关系并非线性,而是复杂的函数关系。通过改变推力大小并观察质心高度和足底高度的变化,可以找到一个相对稳定的推力值,使得推力越大,跳跃高度越高。
6. **水平速度控制**:虽然描述中没有详细展开,但可以推测这涉及到机器人在跳跃过程中的横向移动控制,可能是通过对腿部力量的调整或身体姿态的控制来实现的。
以上就是单腿跳跃机器人仿真设计中的核心知识点,这些理论和技术对于实现机器人动态平衡和高效率运动至关重要。
单腿跳跃机器人仿真设计
本文采用 webots2019b 进行仿真,算法主要参考 Marc Raibert 的“legged robots that
balance”第二、三章。
1 模型
机身高 0.1m,直径 0.6m,重 15kg
腿最大长度 1.2m,初始长度 0.8m,直径 0.02m,质量 1kg
为模拟能量损耗,滑动轴有 0.2 的滑动摩擦系数和 10 的阻尼,webots 默认单位。
2 控制系统
控制目标为实现单腿跳跃机器人稳定跳跃运动,能跳台阶、越障以及在外力干扰下恢复稳定。
单腿跳跃机器人控制系统将跳跃、前进速度和身体姿态作为三个独立的控制问题。
跳跃高度控制(Hopping Heigh)
弹簧倒立摆模型将腿部模拟成一个弹簧,本文采用阻抗控制的方法,通过检测虚拟弹簧
的伸长量,来计算滑动关节上直线电机的力
F
s
:
( )
0
F
ss
kr r
= −
(1)
上式中,
0
rr、
分别为弹簧原长和弹簧实际长度,
s
k
是弹簧刚度,弹簧刚度决定了机
器人弹跳的频率。
跳跃机器人有节奏的上下跳动,在弹簧腿的作用下,可以认为是机器人物理系统的势能
和动能在能量层面的相互转换。在能量转换过程中,必然因阻尼、摩擦、碰撞等因素导致能
量损失,结果系统总能量越来越少,弹跳高度越来越低,最终系统失稳。
因此,必须在弹簧腿的伸长阶段(THRUST 相),为机身额外提供一个推力
F
thrust
,从而补充
能量损失:
下载后可阅读完整内容,剩余5页未读,立即下载
2022-05-15 上传
2019-09-11 上传
2013-01-13 上传
2021-08-14 上传
2021-05-29 上传
2021-08-11 上传
2021-08-12 上传
2021-08-14 上传

柏傅美
- 粉丝: 32
- 资源: 325
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
