履带吸盘爬壁机器人:结构原理与发展趋势探讨
版权申诉
98 浏览量
更新于2024-06-21
收藏 7.23MB DOC 举报
本文档深入探讨了履带吸盘式爬壁机器人结构原理的研究,针对当前爬壁机器人技术的发展趋势和现有结构类型的分析,着重介绍了履带吸盘式设计的独特价值。首先,作者强调了爬壁机器人结构原理研究的重要性和其在工业、搜救等领域的应用潜力,指出车轮式、多吸盘单链和履带式等不同类型的爬壁机器人各有其优缺点。
在第二章,详细阐述了履带吸盘式爬壁机器人的功能需求,包括工作过程、基本功能以及关键设计参数,如履带的结构形式和与履带轮的连接方式,确保了机器人的壁面适应能力和稳定性。吸附机构方案设计是核心部分,包括吸盘式吸附机构的创新设计、吸盘机构的安全性评估,以及气动回路的设计,确保了机器人能够有效地吸附并移动在垂直表面。
第三章深入到具体结构的开发与论证,如吸附结构、行走机构和车体设计,每个环节都经过精心设计和理论论证,以提高机器人性能和可靠性。第四章进一步探讨了附属部件的开发与设计,如背仓、清洁壁面、消防水管传递和控制系统,这些部件共同构成一个完整的工作系统。
最后,第五章总结了研究的主要成果,并对未来的方向进行了展望,指出随着科技的不断进步,履带吸盘式爬壁机器人将在复杂环境下的应用中发挥更大的作用。全文通过严谨的理论分析和实际设计,展示了履带吸盘式爬壁机器人结构原理研究的深度和广度,对于推动该领域的技术创新具有重要的参考价值。
6
器等组成。
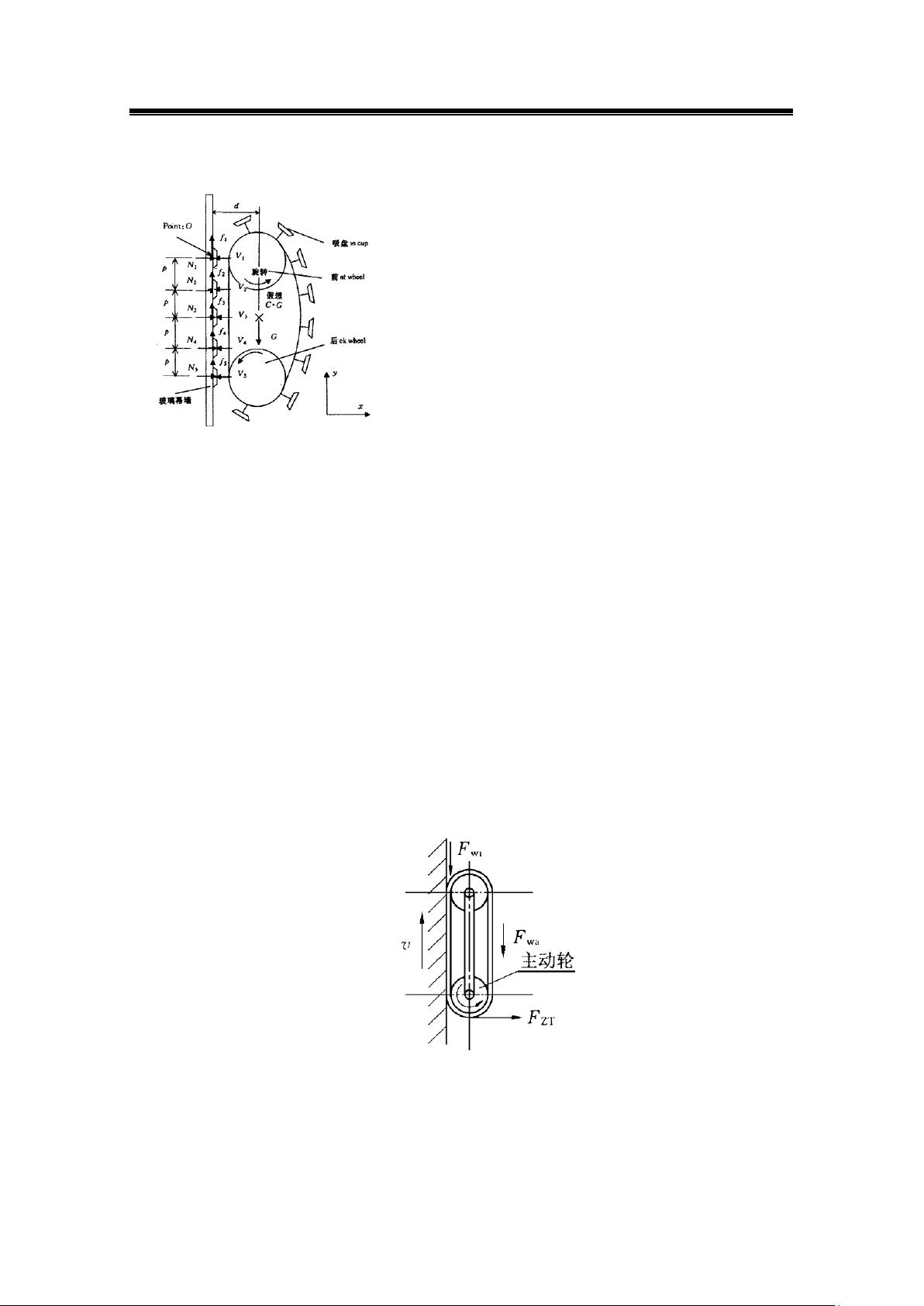
该机器人的特点是采用单链和多吸盘相配
合的结构可以可靠解决转向的问题;采用弹性
机构,使该机器人具有跨越一定障碍的能力;
旋转接头供气方式能够给每一个吸盘供气而避
免通气管缠绕。该爬壁机器人的缺点为结构复
杂,其可靠性相应降低;单履带的模式使机器
人工作时受到吸附力不均匀,吸盘受到较大扭
曲力,从而降低了爬壁机器人的工作寿命。
图1-2多吸盘单链爬壁机器人Cleanbot – IV
(图片来自文献[2])
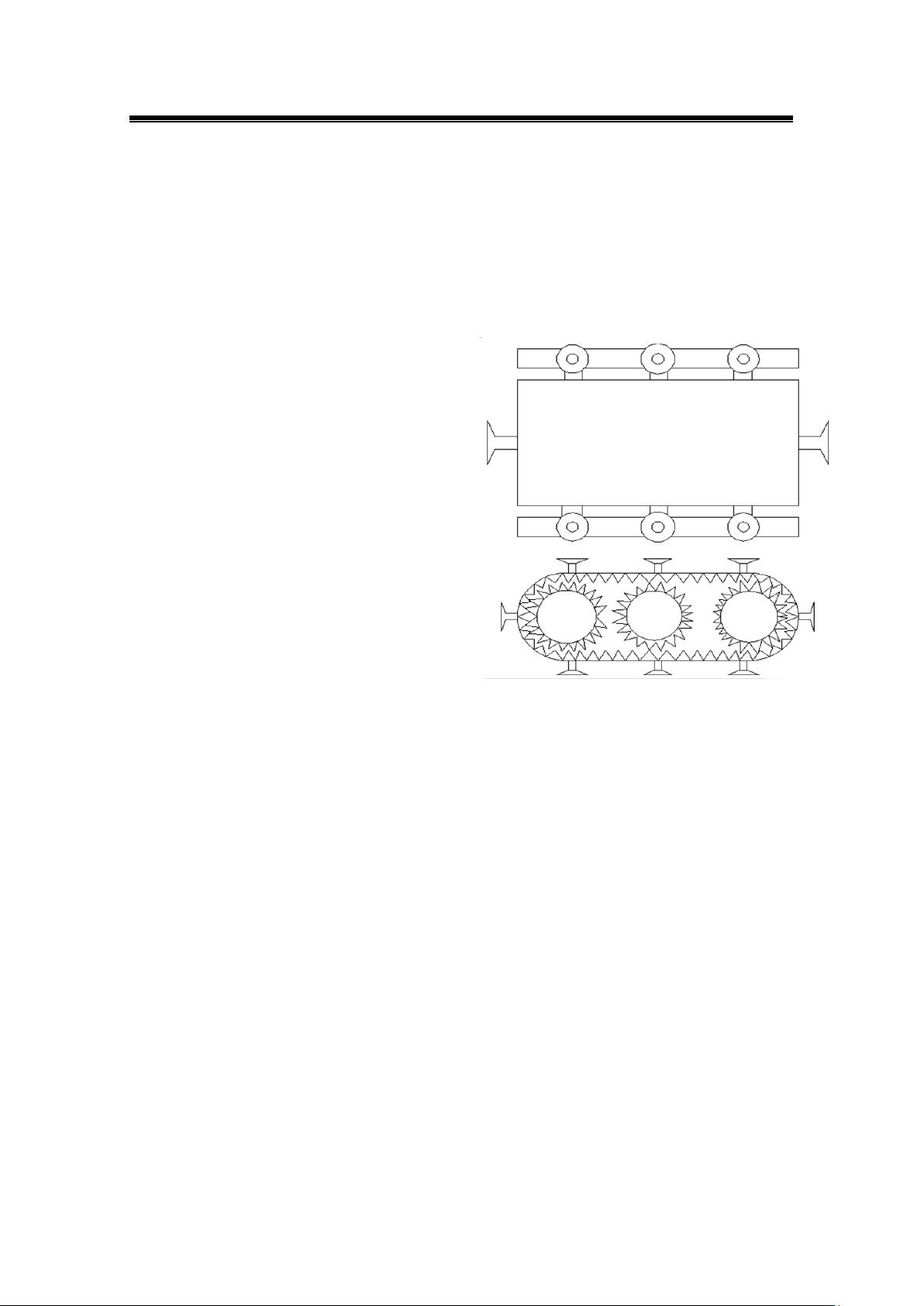
1.3.3 履带式磁吸附爬壁机器人
国家教委博士点基金资助项目履带式磁吸附爬壁机器
】【
人
3
是将永磁体片离散
的装在爬壁机器人的履带上,采用双履带方式,主动轮安装在一端,前后双轮。
电动机带动主动轮转动进而带动爬壁机在壁面上行进。
该机器人的特点是:在机器人设计中采取加长履带、浮动支撑、载荷分散机
构、柔性履带等措施,以提高爬壁机器人的壁面适应能力, 实现其在壁面的安全
爬行。
图1-3 履带式磁吸附爬壁机器人(图片来自文献[3])
其缺点是,履带是用铰链联接的,不能将垂直于履带方向的载荷分布到各个
永磁体上,也就是说履带在垂直于拉力方向上没有刚性,这对于爬壁机器人工作


剩余72页未读,继续阅读
2023-07-15 上传
2024-11-03 上传
2024-11-03 上传
2023-07-15 上传
2021-10-12 上传
2021-10-11 上传

南抖北快东卫
- 粉丝: 80
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
