AT89C52单片机控制的智能探测机器车设计
版权申诉
135 浏览量
更新于2024-07-03
收藏 1.39MB DOCX 举报
"智能探测机器车是一个利用AT89C52单片机为核心的系统,集成了多种传感器和模块,包括寻迹、温湿度测量、超声波测距、颜色识别、语音播报以及数据传输显示等功能,旨在实现自主行走、环境监测和数据报告。"
在该智能探测机器车的设计中,系统方案的制定是关键。首先,通过方案比较与选择,最终确定了以AT89C52单片机作为控制系统的核心,因为它具有良好的处理能力和广泛的适用性。方案描述中提到,系统由多个模块构成,包括电源电路、寻迹模块、温湿度采集模块、超声波测距模块、颜色识别模块、语音播报模块以及数据传输和显示模块。
理论分析与计算部分,主要涵盖了以下几个方面:
1. 寻迹系统:利用传感器检测地面的轨迹标记,确保机器车能够准确地沿着预定路径行驶。
2. 精确定位功能:结合特定的定位点,使机器车能够识别并完成特定任务,如环境温度测量。
3. 360度转身功能:机器车需要具备灵活转向的能力,以适应不同场景的需求。
4. 数据采集功能:包括温度、湿度、距离和颜色等环境数据的收集。
5. 数据上传及播报:采集到的数据将被上传至控制系统,并通过语音播报模块反馈给用户。
6. 电源选择:采用4节3.6V铅酸锂铁电池,提供稳定电源,确保机器车在场地中的持久运行。
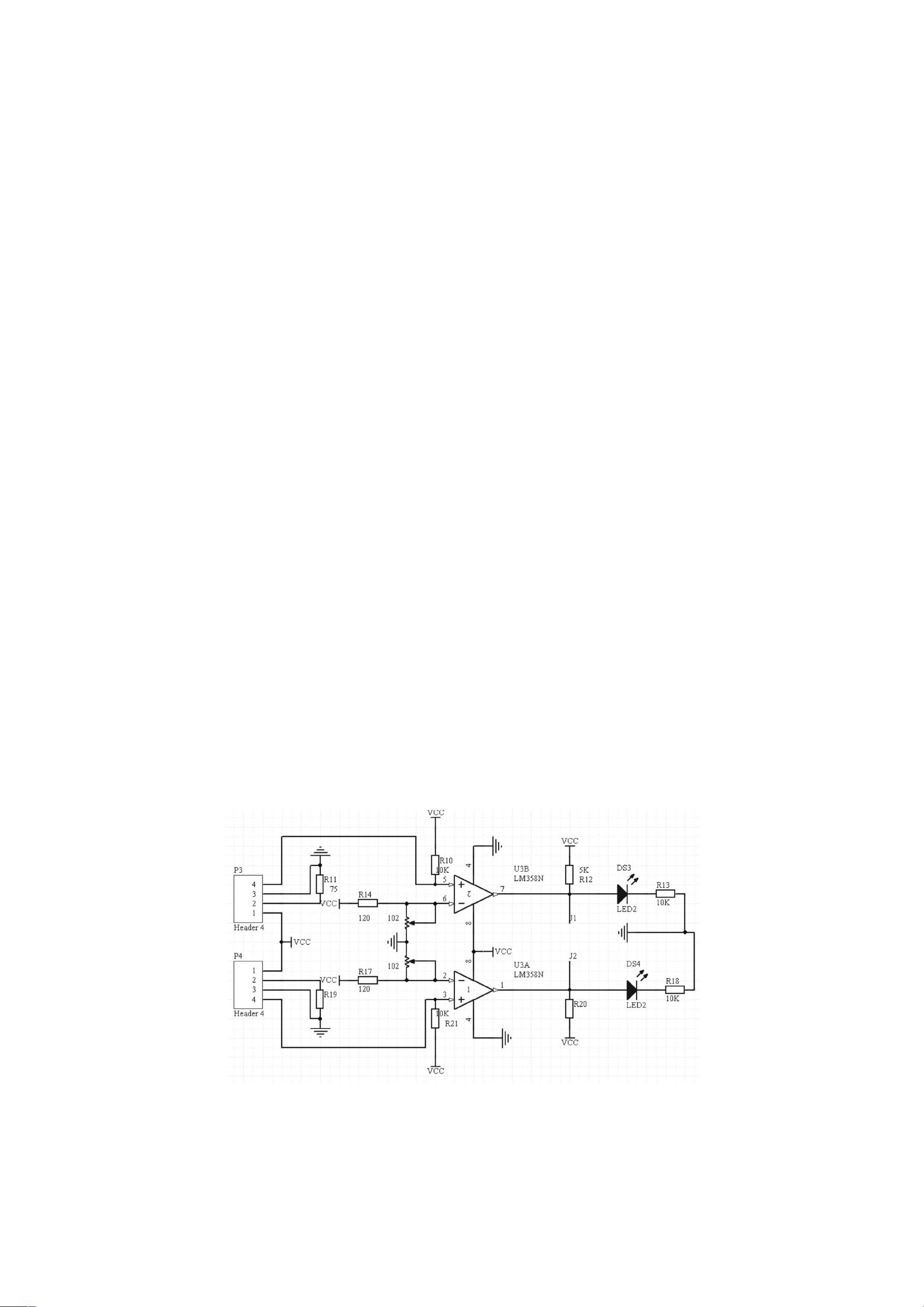
电路设计部分详细介绍了各个模块的电路构造,包括:
1. 寻迹模块电路:设计用于检测地面轨迹的传感器电路。
2. 电机驱动电路:控制机器车移动的电机控制电路。
3. 颜色识别模块:可能包含RGB传感器,用于识别不同颜色。
4. 超声波测距电路:利用超声波传感器进行物体距离检测。
5. 温湿度模块电路:集成DHT11温湿度传感器,用于环境参数测量。
6. 显示部分电路:可能包括液晶显示屏或其他显示设备,用于呈现数据。
程序部分设计包括软件流程图和系统程序编写,确保各个模块协同工作,实现预期功能。
系统测试与结果分析阶段,设计了具体的测试方案,对机器车的各项性能进行验证,包括寻迹准确性、环境数据测量的精度、转身功能的稳定性以及数据传输的可靠性。测试结果和分析有助于优化系统性能,提高整体的可靠性和有效性。
总结与致谢部分是对整个项目开发过程的回顾,可能包含了团队成员的贡献以及对支持者的感谢。
关键词:AT89S52单片机、语音播报系统、DHT11温湿度传感器、颜色传感器和超声波传感器都是这个智能探测机器车系统中的关键技术组件,它们共同构建了一个多功能、自主行动的环境监测平台。
这里超声波波速即为音速340m/s。
图2.4.3 超声波测距模块实物图
2.5 数据上传及播报
数据上传,当探测车采集到数据后,将数据上传到接收装置,在这里我们经过讨
论决定使用 zigbee 模块进行数据传输,Zigbee 是一种高可靠的无线数传网络, 。
Zigbee 数传模块类似于移动网络基站。通讯距离从标准的 75m 到几百米、几公
里,并且支持无限扩展。这完全可以满足我们的要求 ,另外它还具有低功耗、成
本低、时延短、网络容量大、安全可靠等优点。
图2.5.1 zigbee实物图1
图2.5.2 zigbee实物图2
数据播报是将探测车采集来的信息进行语音播报,我们选用的模块具有以下
优点:
(1)载功放模块最高可输出功率 20w,声音响亮。
(2)板载音量调节,可根据实际安装需求进行调整。
(3)全新音频播放控制算法,音质更好。
(4)新型音频信息压缩格式,音频录制时间可 24 分钟。
图2.5.3 语音模块实物图
6
剩余30页未读,继续阅读
201 浏览量
604 浏览量
225 浏览量
2022-11-03 上传
2022-11-24 上传
2023-07-01 上传
2023-02-16 上传
113 浏览量
351 浏览量

xxpr_ybgg
- 粉丝: 6805
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- SINAMICS S120 书本型功率单元.zip
- ember-cli-sparse-array:EmberCLI插件稀疏数组实现
- KeePassOTP:向KeePass添加OTP支持(两因素身份验证)
- CocosCreatorForDeskApp:使用cocos creator开发游戏,打包桌面应用解决方案
- Andre-max
- 372249_724190_compressed_round1_diac2019_test.csv.zip
- 基于HTML实现的棕色马棚饲养宽屏自适应html5(含HTML源代码+使用说明).zip
- 超外差式收音机Multisim仿真电路.rar
- pitorrent:简单撕掉HTTPS的
- Iconoir 简洁实用图标 .svg素材下载
- ThreadPools
- 尼克琼斯从一个vb应用程序向另一个发送唯一消息__1-42641
- 菜单栏亮度:MacOS应用程序更改菜单栏上的屏幕亮度
- Springcloud-config
- 105℃高纹波对应品-尼吉康铝电解电容器.zip
- 基于java的聊天系统(java+applet).zip
