概率机器人学基础:递归状态估计与高斯滤波
需积分: 10 176 浏览量
更新于2024-07-20
收藏 9.55MB PDF 举报
"这是一份关于概率机器人的专业讲义,由Sebastian Thrun、Wolfram Burgard和Dieter Fox等专家编写。该讲义深入探讨了机器人领域中的不确定性处理以及概率方法在其中的应用。"
在这本讲义中,作者们首先介绍了机器人学中普遍存在的不确定性问题(1.1节)。在机器人操作和探索环境中,由于传感器限制、动态环境变化以及模型不精确性,不确定性是无法避免的。不确定性可能源于机器人自身的状态(如位置和姿态),也可能源于对环境的理解。
接着,1.2节提出了概率机器人学的概念,这是一个利用概率理论来处理和建模这些不确定性的方法。这种方法允许机器人通过收集数据并更新其对世界的信念,来逐步改进其决策和行为。
1.3节讨论了概率机器人学的影响。通过概率模型,机器人可以更好地适应不确定环境,提高任务完成的准确性和效率。此外,这种方法还为解决复杂的机器人问题,如自主导航、目标检测和跟踪提供了新的视角。
1.4节给出了讲义的结构概览,即“RoadMap”,它将引导读者逐步深入到更具体的概率估计和滤波技术。1.5节则列出了相关文献,供进一步研究。
接下来,2.0章节详细阐述了递归状态估计(Recursive State Estimation)。这是概率机器人学的核心概念,涉及如何通过新数据不断更新机器人对自身状态的估计。2.2节介绍了概率的基本概念,包括概率分布和随机变量。2.3节则讨论了机器人与环境的交互,包括状态、环境互动和概率生成法则,以及由此产生的信念分布。
2.4节重点介绍了贝叶斯滤波器,这是一种用于动态系统状态估计的统计方法。通过24页的例子和数学推导(2.4.2和2.4.3节),读者可以理解贝叶斯滤波器的工作原理及其在处理不确定性中的作用。2.4.4节介绍了马尔可夫假设,这是许多滤波算法的基础,它简化了状态转移的概率模型。
2.5节探讨了表示和计算方面的问题,这在实际应用中至关重要,因为复杂的概率模型往往需要高效的计算策略。2.6节总结了本章要点,并在2.7节中推荐了相关文献,以便读者深入学习。
3.0章节开始介绍高斯滤波器,特别是卡尔曼滤波器(3.2节),它是处理线性高斯系统的标准工具。3.2.1节定义了线性高斯系统,而3.2.2节详细阐述了卡尔曼滤波器算法,这是概率机器人学中最常用的滤波方法之一。
这份讲义提供了一个全面的概率机器人学框架,涵盖了从基础的概率理论到高级的滤波算法,为理解和实施概率机器人技术提供了坚实的基础。
4 Chapter 1
✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁
✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁
✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁
✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁✁
✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂
✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂
✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂
✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂✁✂
x
bel(x)
✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄
✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄
✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄✁✄
☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎
☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎
☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎✁☎
x
bel(x)
x
p(z|x)
✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆
✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆
✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆✁✆
✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝
✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝
✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝✁✝
x
bel(x)
✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞
✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞
✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞
✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞✁✞
✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟
✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟
✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟
✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟✁✟
x
bel(x)
x
p(z|x)
✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠
✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠
✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠
✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠✁✠
✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡
✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡
✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡
✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡✁✡
x
bel(x)
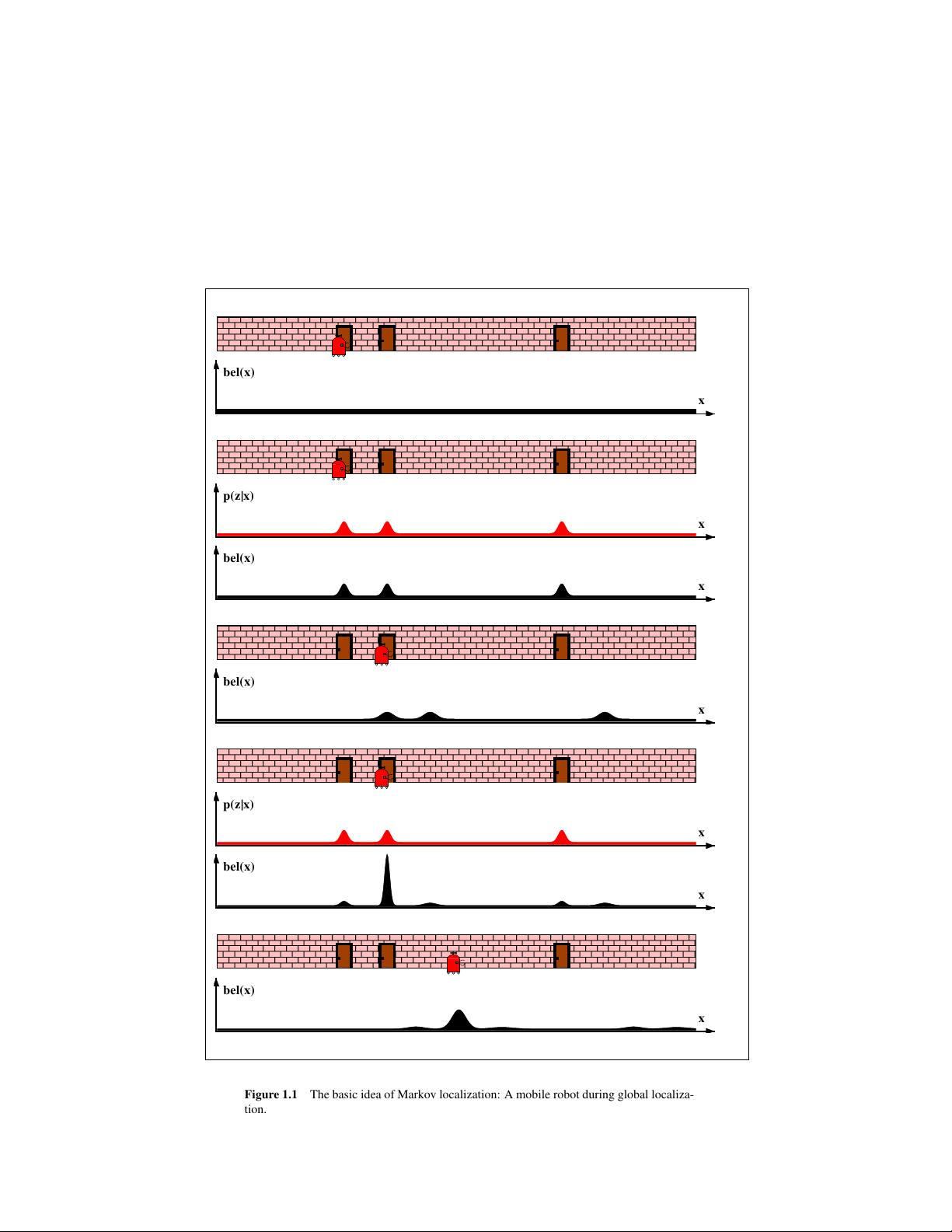
Figure 1.1 The basic idea of Markov localization: A mobile robot during global localiza-
tion.

剩余491页未读,继续阅读
2019-05-16 上传
2011-02-23 上传
2023-03-16 上传
2019-07-24 上传
2013-05-26 上传
2016-07-11 上传
2023-07-02 上传

uglyxjsxl
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 俄罗斯RTSD数据集实现交通标志实时检测
- 易语言开发的文件批量改名工具使用Ex_Dui美化界面
- 爱心援助动态网页教程:前端开发实战指南
- 复旦微电子数字电路课件4章同步时序电路详解
- Dylan Manley的编程投资组合登录页面设计介绍
- Python实现H3K4me3与H3K27ac表观遗传标记域长度分析
- 易语言开源播放器项目:简易界面与强大的音频支持
- 介绍rxtx2.2全系统环境下的Java版本使用
- ZStack-CC2530 半开源协议栈使用与安装指南
- 易语言实现的八斗平台与淘宝评论采集软件开发
- Christiano响应式网站项目设计与技术特点
- QT图形框架中QGraphicRectItem的插入与缩放技术
- 组合逻辑电路深入解析与习题教程
- Vue+ECharts实现中国地图3D展示与交互功能
- MiSTer_MAME_SCRIPTS:自动下载MAME与HBMAME脚本指南
- 前端技术精髓:构建响应式盆栽展示网站
