透明与镜面物体重建:现状与挑战
需积分: 10 75 浏览量
更新于2024-07-22
收藏 1.17MB PDF 举报
本文档主要探讨了"透明和镜面物体(Transparent and Specular Object)的重建技术",针对过去20年间计算机图形学领域的研究趋势。过去的研究主要集中在处理具有兰伯特反射率的不透明物体,然而,近年来随着技术的发展,透明、折射、镜面材质以及动态场景的三维获取问题逐渐成为研究焦点。传统的物体获取方法依赖于表面反射光,而对于那些受全局光传输显著影响或光照过暗的透明材料制成的物体,或者镜面表面,这些对象的精确捕捉仍然面临挑战。
在过去的几十年里,虽然取得了显著的进步,但透明物体的数字化获取并未完全解决。尽管透明物体的三维建模备受关注,但实际应用中的技术难题尚未得到充分解决。报告对这一领域进行了详尽的文献回顾和分类,旨在提供一个当前的研究状态概述,包括但不限于以下知识点:
1. **透明物体特征**:透明物体由于其透过性,需要特殊的处理方法来捕捉内部结构和光线传播路径。这涉及到光学特性如折射、散射以及光线穿透物体后的行为。
2. **镜面反射与漫反射的区别**:镜面物体反射的是镜像般的光,而镜面反射遵循菲涅尔定律,这与兰伯特反射(所有方向的入射光都被均匀反射)有显著不同,导致获取这类表面的图像处理更为复杂。
3. **非线性光学模型**:对于透明物体,可能需要考虑非线性光学效应,如干涉和衍射,这些在传统光学模型中往往被忽略。
4. **多视图重建**:利用多视角拍摄的图像数据,通过结构从运动(Structure from Motion, SfM)或立体视觉技术来恢复透明物体的形状,同时需要处理光照变化带来的复杂性。
5. **反光与阴影处理**:透明物体表面可能会产生复杂的反光和阴影效果,如何准确地分离出这些信号并将其转化为有用的几何信息是关键。
6. **动态场景重建**:如果场景中包含动态透明或镜面元素,动态捕捉技术如光场捕捉、运动捕捉和实时渲染也需要同步发展。
7. **硬件和软件解决方案**:报告还涵盖了现有的硬件设备(如高精度相机、激光扫描仪等)以及相应的软件工具和算法,它们在透明和镜面物体重建过程中的作用和局限性。
8. **未来发展趋势**:讨论了当前研究的挑战和可能的发展方向,包括更高级的照明控制、计算效率的提升以及与人工智能和深度学习的结合。
这篇文章为透明和镜面物体的三维重建提供了全面的概述,揭示了这一领域当前的研究进展和未来的潜力,对于从事计算机视觉、图形学和光学工程的科研人员以及相关行业的工程师来说,具有重要的参考价值。
I. Ihrke et al. / Transparent and Specular Object Reconstruction 2405
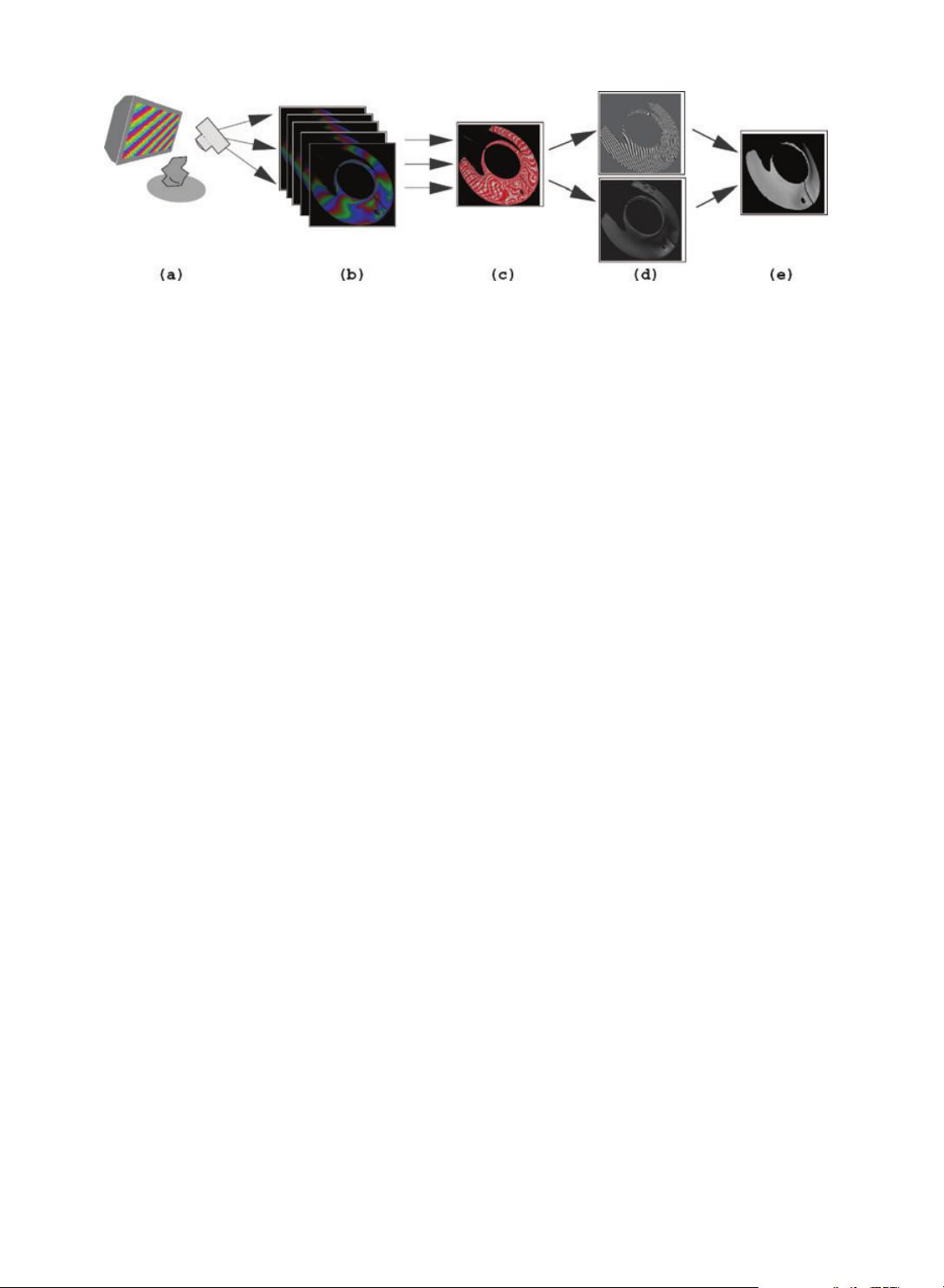
Figure 4: The principle of shape-from-distortion based measurements. (a) The setup consists of a single or a number of
patterns in fixed world positions. The pattern is illuminating a specular object diffusely while a camera takes images. (b)
Captured example images. (c) The observed patterns encode one world position for every pixel of the camera. (d) From this
information depth and normal can be extracted. (e) A resulting surface scan [TLGS05].
object, resulting in the depth-normal ambiguity mentioned
before. The principle of the experimental setup for shape-
from-distortion approaches is shown in Figure 4.
2.1.1. Calibrated patterns
One of the earliest approaches of specular surface acquisi-
tion based on shape-from-distortion was proposed by Schultz
[Sch94]. The pattern is assumed to be known and consists of
a partial radiance map of the sky-sphere. The author develops
an algorithm based on information propagation from known
seed points. Reflections on refractive and mirror-like sur-
faces are simulated from four viewpoints and the algorithm
is evaluated on synthetic data.
Halstead et al. [HBKM96] present a shape-from-distortion
approach for the measurement of the human cornea. They
describe a one-view setup where the camera is placed at
the tip of a conically shaped pattern. By observing the re-
flections in the human eye, and employing an inverse ray-
tracing approach the authors reconstruct 3D surface models
of the human eye. The reconstruction approach is iterative
and performs normal fitting using a spline representation of
the surface followed by a refinement step.
Bonfort and Sturm [BS03] develop a multi-view technique
based on specularly reflected observations of a calibrated
world pattern. The method is voxel-based and is similar to
space carving techniques [KS00]. The algorithm first com-
putes a normal for every voxel in every view. This is possible
because of the depth-normal ambiguity in the one-view case
where only one reflected world point is measured. In the
second phase the algorithm determines the object surface by
voxel colouring, the voxels with the most consistent normals
for different views are considered to be surface voxels.
Nehab et al. [NWR08] also define a consistency measure
for normal directions. They use this measure to replace the
matching cost in standard stereo algorithms, an approach in-
troduced by Sanderson et al. [SWN88]. However, because
the matching lacks robustness, the authors anisotropically
diffuse the error landscape to remove spurious mismatches.
Additionally, an analysis of reconstruction ambiguities is pre-
sented.
Tarini et al. [TLGS05] present a one-view approach where
different patterns at the same world location are used to com-
pute pixel to world plane correspondences with sub-pixel ac-
curacy. The patterns are generated using a computer monitor.
Since the monitor is placed in close proximity of the object
the inherent depth-normal ambiguity has to be considered.
The authors resolve it using an iterative approach. An initial
guess for the depth value is propagated and corresponding
normals are computed. The normal field is then integrated to
obtain an updated depth estimate from which updated nor-
mals are computed. The process is iterated until the surface
shape converges. The approach is unique in that it includes
attenuation of the reflected pattern as is, for example the
case in coloured metals like copper and gold. An overview
of the approach which exemplifies the shape-from-distortion
framework is shown in Figure 4.
2.1.2. Theoretical analysis
A theoretical analysis of shape-from-distortion for specular
surfaces has been presented by Oren and Nayar [ON96] and
Savarese et al. [SP01, SP02, SCP05].
Oren and Nayar [ON96] consider specular surface recon-
struction in a structure-from-motion [HZ00] setting. The ap-
parent motion of features in the image plane of a moving
camera is analysed. The authors develop a classification be-
tween ‘real’ features, that is, world points not reflected by
a specular object and ‘virtual’ features, that is, features in-
fluenced by specular reflection. The theory is based on en-
velopes of reflected rays, that is, caustic curves. It is shown
that in the case of co-planar camera movement with respect
to the surface, a profile can be computed from just two spec-
ularly reflected features. For 3D profiles, tracking of a single
specular feature from the occluding boundary of the object is
c
2010 The Authors
Computer Graphics Forum
c
2010 The Eurographics Association and Blackwell Publishing Ltd.
剩余26页未读,继续阅读
2022-07-15 上传
2019-08-08 上传
2021-08-27 上传
2016-10-15 上传
2021-04-04 上传
2017-08-12 上传
2021-02-08 上传

e_bigmouth
- 粉丝: 4
- 资源: 33
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
