NUCLEO-G474RE开发板搭配LSM6DSO传感器的Data Fusion演示
需积分: 5 3 浏览量
更新于2024-08-03
收藏 1.11MB PDF 举报
"这篇应用笔记主要介绍了如何使用NUCLEO-G474RE开发板结合LSM6DSO MEMS传感器实现数据融合演示。通过Unicleo-GUI软件,可以快速评估和展示传感器性能。文章详细阐述了配置过程,包括在STM32CubeMX或STM32CUBEIDE中选择开发板,下载X-CUBE-MEMS1软件包,选择适用于LSM6DSO的扩展板软件支持,启用定时器和中断,配置串口和DMA,以及设置IIC接口和RTC、CRC功能。"
本文主要讨论的是基于STM32 NUCLEO-G474RE开发板上集成LSM6DSO传感器进行数据融合演示的实现步骤。LSM6DSO是一款集成3D数字加速度计和3D数字陀螺仪的微型电子机械系统(MEMS)传感器,广泛应用于运动检测和姿态控制等领域。为了快速评估和演示该传感器的功能,文章推荐使用Unicleo-GUI,这是一个专为运动MEMS和环境传感器设计的图形用户界面工具,能够直观地展示传感器数据和算法。
配置过程中,首先需要在STM32CubeMX或STM32CUBEIDE中选择NUCLEO-G474RE开发板,并下载相应的软件包X-CUBE-MEMS1,该软件包提供了对传感器的支持和运动算法库。接着,选择IKS01A3扩展板的软件支持,虽然实际使用的扩展板可能简化了IKS01A3,但仍然保留了LSM6DSO传感器。
为了收集和处理数据,需要启用一个定时器并配置中断,以便定期获取传感器读数。同时,串口通信需配置为912600bps,以匹配Unicleo-GUI的设定。串口接收使用DMA(直接内存访问)提高效率。在硬件连接部分,LSM6DSO与MCU通过IIC接口通信,因此需要正确配置IIC接口并映射相关引脚。
此外,文中还提到启用RTC(实时时钟)和CRC(循环冗余校验),因为RTC在应用程序中可能会被用到,而Motion_FX算法库则依赖CRC进行数据校验。在SoftwarePacks中选择相应的扩展选项以确保所有必要的组件都已启用。
这篇文章提供了一个详细且实用的指南,帮助开发者快速在NUCLEO-G474RE开发板上集成LSM6DSO传感器并实现数据融合的演示,这对于任何希望在物联网、可穿戴设备或机器人等项目中应用此类传感器的人来说都是非常有价值的参考。
LAT1165
Local Application Tips
LAT1165 – Rev 1.0 – Oct. 2022
NUCLEO-G474RE 开发板扩展 LSM6DSO 实现 Data Fusion 演示
关键字:LSM6DSO,MEMS,Unicleo-GUI
1. 前言
当使用一个新的开发板做为基板,使用现有软硬件资源,实现对 MEMS sensors 的评估
或工程演示时,往往需要快速地得到直观的评估效果。Unicleo-GUI 是针对运动 MEMS 和
环境传感器扩展软件的 GUI,主要功能是演示 MEMS 传感器和算法。LSM6DSO 是一款具
有 3D 数字加速计和 3D 数字陀螺仪的 MEMS Sensor。本文针对 NUCLEO-G474RE 平台搭
载 LSM6DSO 实现快速效果评估演示的过程进行阐述。
2. 配置过程
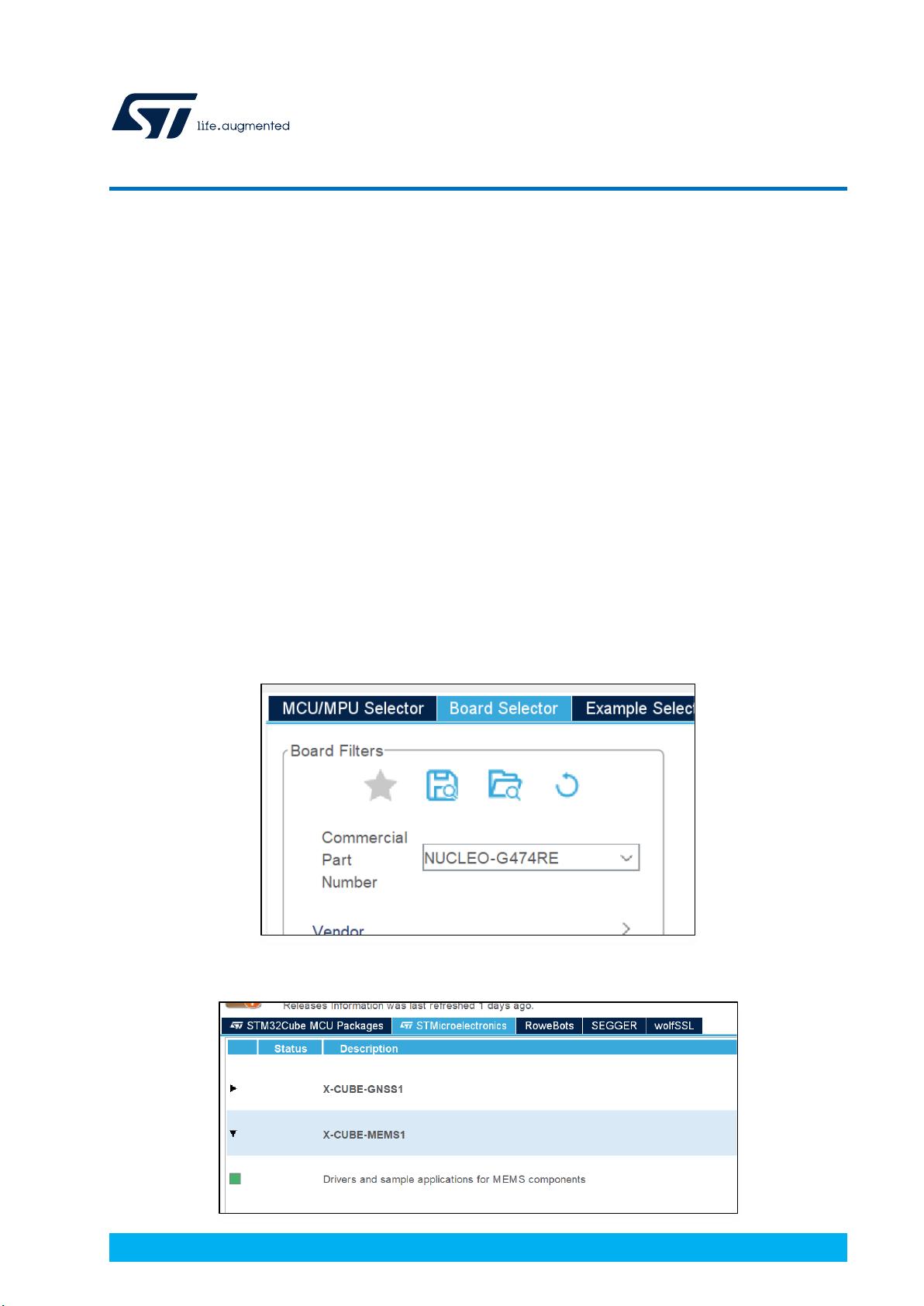
使用 STM32CubeMx 或 STM32CUBEIDE 集成的 CubeMX 选择开发板,使用开发板默
认配置即可。
图1. CubeMX 选择开发板
下载 X-CUBE-MEMS1 软件包:
图2. X-CUBE-MEMS1 软件包
下载后可阅读完整内容,剩余9页未读,立即下载
2023-08-17 上传
2023-12-06 上传
2023-08-17 上传
2022-05-16 上传
2021-03-16 上传
2021-03-22 上传

冻结的鱼
- 粉丝: 2003
- 资源: 165
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
