"基于单片机的悬挂系统设计:高性能、精确控制与广泛应用"
140 浏览量
更新于2024-04-14
收藏 575KB DOC 举报
Abstract
This project focuses on the design and development of a suspension system controlled by a microcontroller. By calculating relevant parameters and designing appropriate programs, the system is able to meet the performance requirements of the project. The core component of the system is the microcontroller, which is chosen for its high integration, cost-effectiveness, simple peripheral circuits, and efficiency, making it widely applicable in real-life applications. The suspension trajectory control system is a motor control system that allows objects to move in linear, circular, tracing, and other patterns within a 80cm x 100cm range, displaying the coordinates of the moving object during operation.
In this design, the MSP430F1611 microcontroller is used to control the stepper motor, which is precisely measured by a multi-turn potentiometer for the position of the suspended object. A local closed-loop feedback control loop is introduced to correct errors, allowing for precise control of the object and accurate positioning of coordinates. Control signals are passed through an L298 drive circuit to operate the stepper motor and complete the specified actions. Additionally, a keyboard is used to input parameters for any desired coordinate point, with an LCD display showing the coordinates of the pen location in the suspended object.
The software functionality module is responsible for controlling the position, velocity, direction, and motion time of the stepper motor.
Keywords: microcontroller, stepper motor, algorithm.
2
1 方案的比较与论证
1.1 设计任务
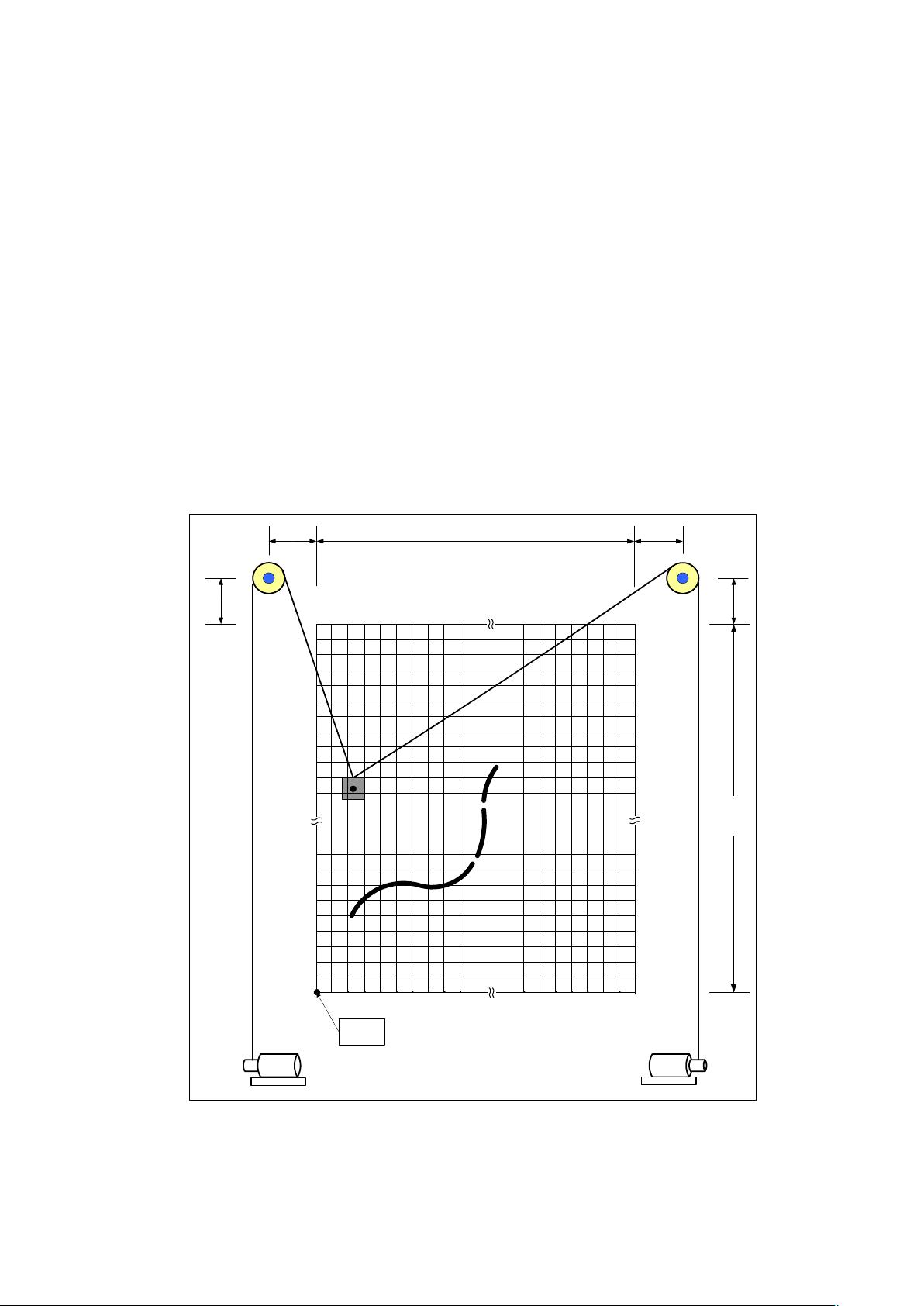
本课题要设计一电机控制系统,控制物体在倾斜(仰角≤100 度)的板上运动。
具体为在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊
绳控制一物体在板上运动,运动范围为 80cm×100cm。物体的形状不限,但质量大于
100 克。在物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。板上标有间
距为 1cm 的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下图
1-1 所示。
图 1-1 任务示意图
80cm
100cm
15cm 15cm
15cm
原点
15cm

剩余31页未读,继续阅读
2023-06-21 上传
2021-10-05 上传
2021-10-02 上传
2022-07-02 上传
2021-09-21 上传
2024-05-19 上传
2024-06-26 上传

yyyyyyhhh222
- 粉丝: 455
- 资源: 6万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
