第八届全国大学生飞思卡尔智能汽车竞赛规则解析
需积分: 4 4 浏览量
更新于2024-09-14
收藏 2.25MB DOC 举报
"第八届全国大学生“飞思卡尔”杯智能汽车竞赛的竞速比赛规则与赛场纪律,参赛队伍需使用指定的微控制器和车模套件,通过不同方式进行路径检测,分为电磁组、光电平衡组和摄像头组。比赛成绩由赛车完成赛道的时间决定,并需提交车模技术报告。大赛器材有限制,例如使用特定型号的车模、电机和舵机,且各组车模运行方式不同。"
在这场备受瞩目的第八届全国大学生“飞思卡尔”杯智能汽车竞赛中,参赛者们面临着一项极具挑战性的任务——利用飞思卡尔半导体公司的8位、16位或32位微控制器作为核心,结合传感器、电机驱动、转向舵机控制和控制算法软件,设计并制作出能够自主行驶的智能车。比赛分为三个赛题组,每组都有其独特的道路检测方法和车模规格。
电磁组的参赛队伍需使用A型车模,通过感应赛道中心电线产生的交变磁场来确定路径。车模的设计要求是转向轮在前,动力轮在后,这种设计有助于车辆稳定行驶并准确感应磁场变化。
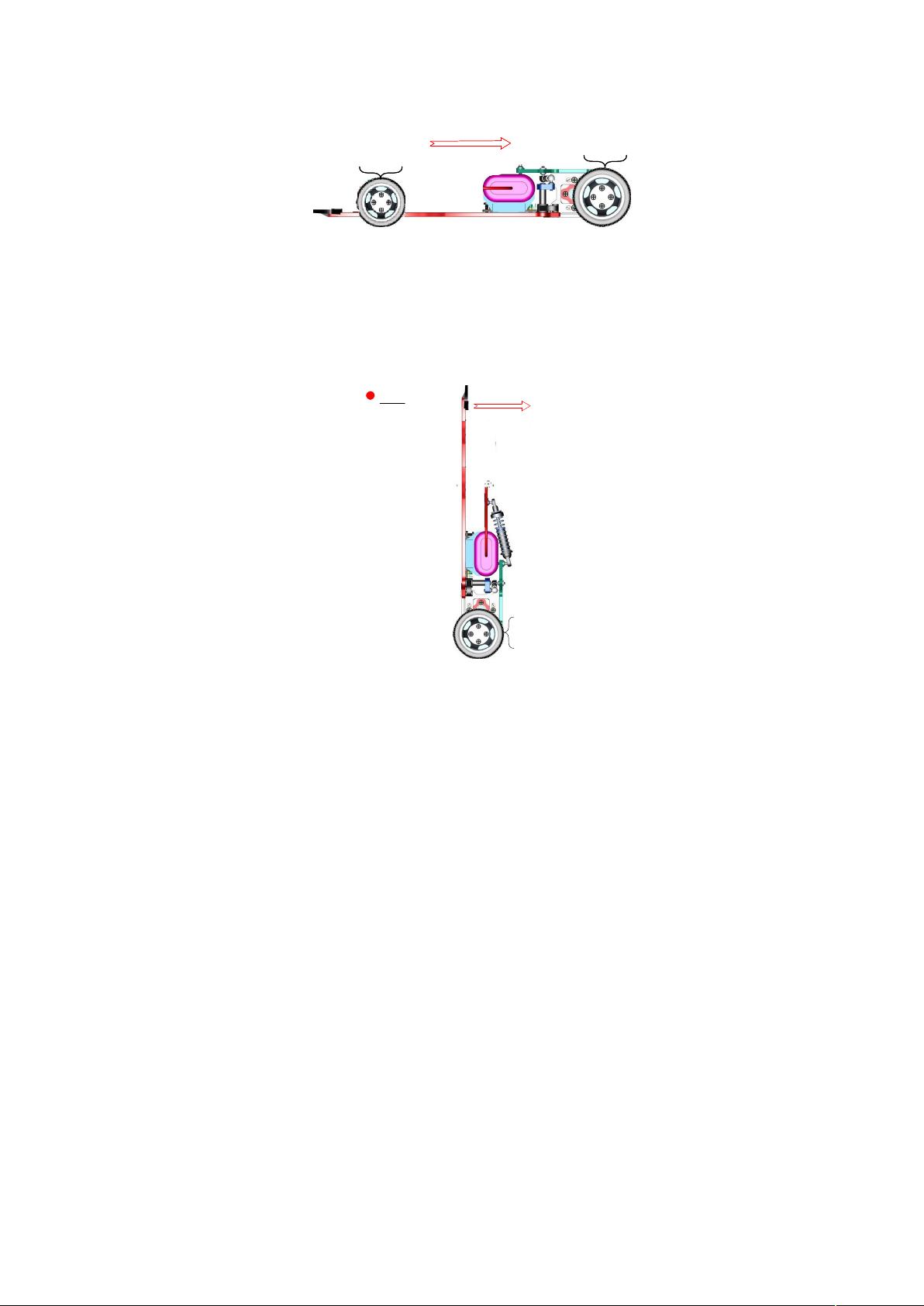
摄像头组则使用B型车模,但运行方向与电磁组相反,动力轮在前,转向轮在后。车辆需通过采集赛道图像或连续扫描反射点来识别路径,这就需要参赛者具备高级的图像处理和算法开发能力。
光电平衡组则别具一格,参赛队伍需要使用D型车模,让车模保持直立行走。这一组别对车辆的稳定性要求极高,需要精确的传感器配合和精细的控制策略,以确保车模能在不倒下的情况下前行。
竞赛规则严格,器材限制明确,如电机型号、舵机品牌等都由竞赛秘书处指定。所有参赛队伍在完成赛道比赛的同时,还必须提交一份详尽的技术报告,展示他们的设计思路和技术实现。全国总决赛的排名完全依赖于赛车现场成功完成赛道的时间,这不仅考验了团队的技术实力,也对团队的策略规划和现场调整能力提出了高要求。
这样的比赛无疑是对大学生创新能力和工程实践能力的一次全面检验,也是推动中国智能汽车技术发展的重要平台。通过参与这样的竞赛,学生可以深化对嵌入式系统、传感器技术、电机控制和图像处理等多方面知识的理解,同时提升团队协作和项目管理能力,为未来的职业生涯打下坚实基础。
动 力 轮
转 向 轮
车 模 运 行 方 向
动 力 轮
转 向 轮
车 模 运 行 方 向
图 2 摄车模运行模式
(3) 光电平衡组:车模直立行走。
使用 D 型车模。车模运行时只允许动力轮着地,车模直立行走。车模
运行方向应按照图 3 所示:
C车 模
动 力 轮
车 模 运 行 方 向
原 来 的 转 向
轮 没 有 用 ,
可 以 去 除 掉 。
注意
车 模 请 按
照 图 示 的
方 向 运 行 。
图 3 光平衡组车模运行模式
细节及改动限制见附件一。
2. 须采用飞思卡尔半导体公司的 8 位、16 位、32 位处理器作为唯一的微控制器。
有关细节及其它电子器件使用的限制见附件二;
3. 三个赛题组使用传感器限制:
参加电磁赛题组不允许使用光学传感器获得道路的光学信息,但是可以
使用光电码盘测量车速;
参加光电平衡组的车模可以使用光电传感器、指定型号的线性 CCD 传感
器进行道路检测,禁止使用激光传感器。
光 电 平 衡 组 若 采 用 线 性 CCD , 需 使 用 Texas Advanced Optoelectronic
Solution 公司的 TSL1401 系列的线性 CCD,如下图所示:
3
剩余12页未读,继续阅读
118 浏览量
2013-05-10 上传
117 浏览量
129 浏览量
169 浏览量
195 浏览量
207 浏览量
136 浏览量
853 浏览量

i19910918
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- django-dashing:django-dashing是Django的可定制的模块化仪表板应用程序框架,用于可视化有关项目的有趣数据。 受仪表板框架启发
- 7z,没有广告的解压工具
- filepond-plugin-file-poster:将海报图像添加到文件中
- HTML5 canvas实现生物圈里的细胞运动动画效果源码.zip
- 简码
- Bikcraft-wordpress
- RentACarV1BackEnd
- currency-parser:金融.ua汇率
- 数据恢复工具 壁虎数据恢复 v3.4
- html5 canvas实现响应鼠标拖动的流体图片动画特效源码.zip
- 盖塔皮
- split:基于机架的AB测试框架
- dimmer-button
- PR_K._语音识别_语音性别识别_
- ETL_Project
- bookbrainz-api
