疫情下的激光雷达仿真建图:从URDF到Gazebo
需积分: 10 116 浏览量
更新于2024-09-04
收藏 3.73MB DOCX 举报
"该文档详细介绍了如何在Linux环境下利用ROS(机器人操作系统)和Gazebo仿真软件进行激光雷达SLAM算法的仿真验证。由于实际操作的困难,作者选择了通过仿真来实现激光雷达的建图功能。文档主要内容包括创建工作空间、建立硬件描述包、编写URDF(统一机器人描述格式)文件以及配置launch文件以在rviz和Gazebo中显示机器人模型。"
在ROS中,仿真是一个重要的组成部分,特别是在无法直接进行实地测试的情况下。这里,作者首先提到了创建一个名为"smartcar_description"的工作空间和硬件描述包,这是定义机器人模型的基础。URDF文件是一种基于XML的语言,用于描述机器人的结构,包括链接(link)和关节(joint)。`<link>`标签定义了机器人的各个部件,如车体,而`<joint>`标签则描述了这些部件之间的相对运动。
URDF文件的结构大致如下:
```xml
<link name="link_name">
<inertial>...</inertial>
<visual>...</visual>
<collision>...</collision>
</link>
```
`<inertial>`标签定义了链接的惯性属性,包括质量、质心位置和惯性张量,这对于模拟物理行为至关重要。`<visual>`标签则关注链接的外观,通常用于渲染目的,而`<collision>`标签用于定义碰撞检测的几何形状,确保物理交互的正确性。
在描述智能小车时,作者提到了车身和车轮的构造,这两个部分都是通过复制和修改基本模板来创建的。关节部分的定义,如小车的旋转或移动关节,需要包含父子连接信息,以便理解各个组件如何相对移动。
为了在rviz和Gazebo中查看3D模型,需要创建launch文件。launch文件是ROS中启动节点和配置系统的重要方式。作者提供了一个基础的`.launch`文件示例,并展示了在rviz中加载模型的步骤,强调需要手动添加RobotModel并指定正确的固定链接。
在urdf文件中添加物理属性和碰撞属性后,需要创建`gazebo.launch`文件,以配置仿真环境的参数,包括机器人的物理特性和Gazebo的显示设置。最后,通过运行`roslaunch`命令启动Gazebo仿真环境,小车模型将在Gazebo中显示出来。
总结来说,这个文档详细阐述了如何在ROS和Gazebo中设置一个基于激光雷达的SLAM仿真环境,包括创建URDF模型、定义链接和关节、配置launch文件以在rviz和Gazebo中显示模型,以及在Gazebo中运行仿真。这些步骤对于理解ROS中的机器人仿真流程和Gazebo的使用是非常有价值的。
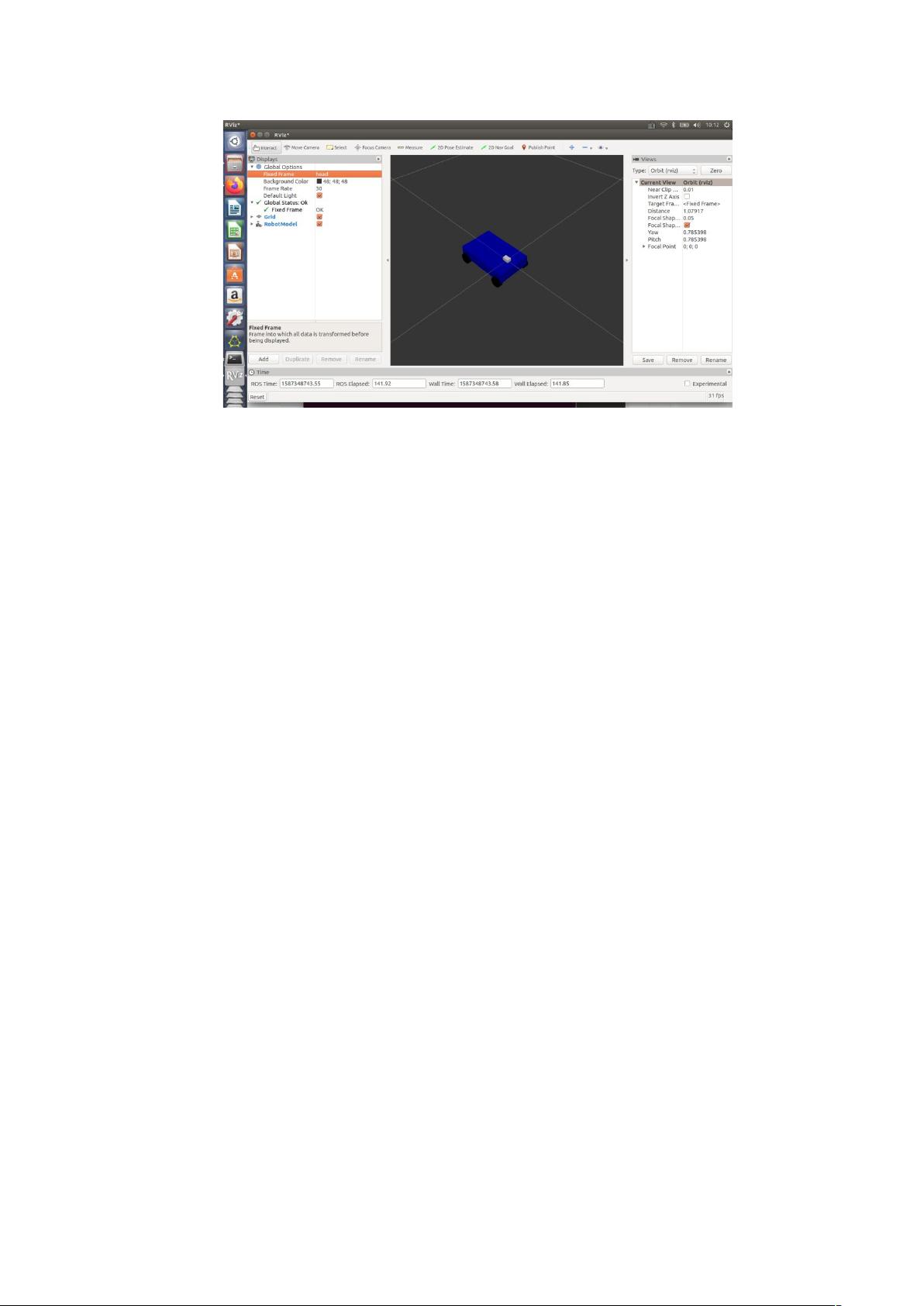
图 >,+/"' 显示小车仿真图
运 行 后 会 发 现 在 ' 里 是 没 有 模 型 的 , 这 时 需 点 击 左 边 添 加
,将 !) 选择为 &5 即可出现上图。
在建立后在 文件中再添加物理属性和碰撞属性: 和 字
段设定几何尺寸,重量并添加纹理等创建 ,5 文件设置 5 文件参
数,运行 的仿真环境和加载的机器人参数等即可在 中显示如下。
剩余12页未读,继续阅读
151 浏览量
2024-08-31 上传
2024-08-31 上传
2024-08-31 上传
2024-08-31 上传
2024-08-31 上传
2024-08-31 上传
2024-08-31 上传
2024-08-31 上传

无敌山鬼谣
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 微信小程序开发教程源码解析
- Step7 v5.4仿真软件:s7-300最新版本特性和下载
- OC与HTML页面间交互实现案例解析
- 泛微OA官方WSDL开发文档及调用实例解析
- 实现C#控制佳能相机USB拍照及存储解决方案
- codecourse.com视频下载器使用说明
- Axis2-1.6.2框架使用指南及下载资源
- CISCO路由器数据可视化监控:SNMP消息的应用与解析
- 白河子成绩查询系统2.0升级版发布
- Flutter克隆Linktree:打造Web应用实例教程
- STM32F103基础之MS5单片机系统应用详解
- 跨平台分布式Minecraft服务端:dotnet-MineCase开发解析
- FileZilla FTP服务器搭建与使用指南
- VB洗浴中心管理系统SQL版功能介绍与源码分析
- Java环境下的meu-grupo-social-api虚拟机配置
- 绿色免安装虚拟IE6浏览器兼容Win7/Win8
