EK混动系统CAN通讯协议详解
需积分: 0 97 浏览量
更新于2024-06-30
收藏 118KB DOCX 举报
"EK混动电机CAN通讯协议1.171"
本文档详细阐述了混合动力系统中,尤其是EK混动系统,各个组件之间通过CAN(Controller Area Network)总线进行通信的协议标准,主要涉及系统控制器(EMU)、整车控制器(VCU)、发动机&控制器(ECU)以及驱动电机与控制器(MCU1, MCU2)。协议基于SAE J1939标准,用于确保数据传输的准确性和一致性。
1. 混合动力系统概述
在混合动力系统中,系统控制器(EMU)作为核心组件,负责协调和控制其他部件,如驱动电机(ISG电机和TM电机)以及相关的控制器。本协议旨在规定这些组件间通信的数据格式和定义,确保系统的高效运行。
2. 适用范围
该协议适用于EK混动系统的S、M、B、L系列,不仅涵盖常规的开发、测试,还支持系统在实际运营中的维护工作。特别地,驱动电机2(TM2)和其控制器(MCU3)的应用限于特定车型,提供双电机驱动功能。
3. 引用标准
本协议参照了两个关键标准:
- ISO11898: 定义了道路车辆中高速CAN2.0通信的规范,确保数据的可靠传输。
- SAE J1939: 是针对公路车辆的控制和通信网络的推荐实践,规定了车辆电子系统间的通信协议。
4. 术语定义
- 混合动力城市客车:集成电动和传统燃油动力的公共交通车辆。
5. CAN网络拓扑
- 未具体描述,但通常包括主CAN总线和其他可能的子总线,用于区分不同类型的通信。
6. 物理接口
- 接口可能遵循ISO11898标准,采用CAN-High和CAN-Low两根线,用于信号传输。
7. PDU格式
- PDU(Protocol Data Unit)是CAN协议中的数据结构,包括物理层传输的数据位流,这里未详细描述。
8. 驱动电机与控制器通信
- 文档列举了多个PGN(Parameter Group Number)用于不同电机和控制器之间的通信,如ISG电机的控制指令和状态反馈,以及TM1和TM2电机的相关信息。每个PGN对应一个或多个数据帧,包含了电机控制模式、转速、扭矩等相关参数。
例如,PGN 0x006100用于控制ISG电机,其中4位的isg_ctrl_mod_dmd_sd字段定义了电机控制模式:
- 00: 自由转,电机不被强制控制
- 01: 转速控制模式,电机转速由指令决定
- 10: 扭矩控制模式,电机扭矩由指令设定
- 11: 主动放电控制模式,电机在非工作状态下帮助电池放电
这些详细定义确保了在不同控制模式下,电机能正确响应系统控制器的指令。
总结,本协议文档是理解EK混动系统内部CAN通信的关键,提供了组件间交互的详细规则,有助于开发者和维护人员有效诊断和优化系统的性能。
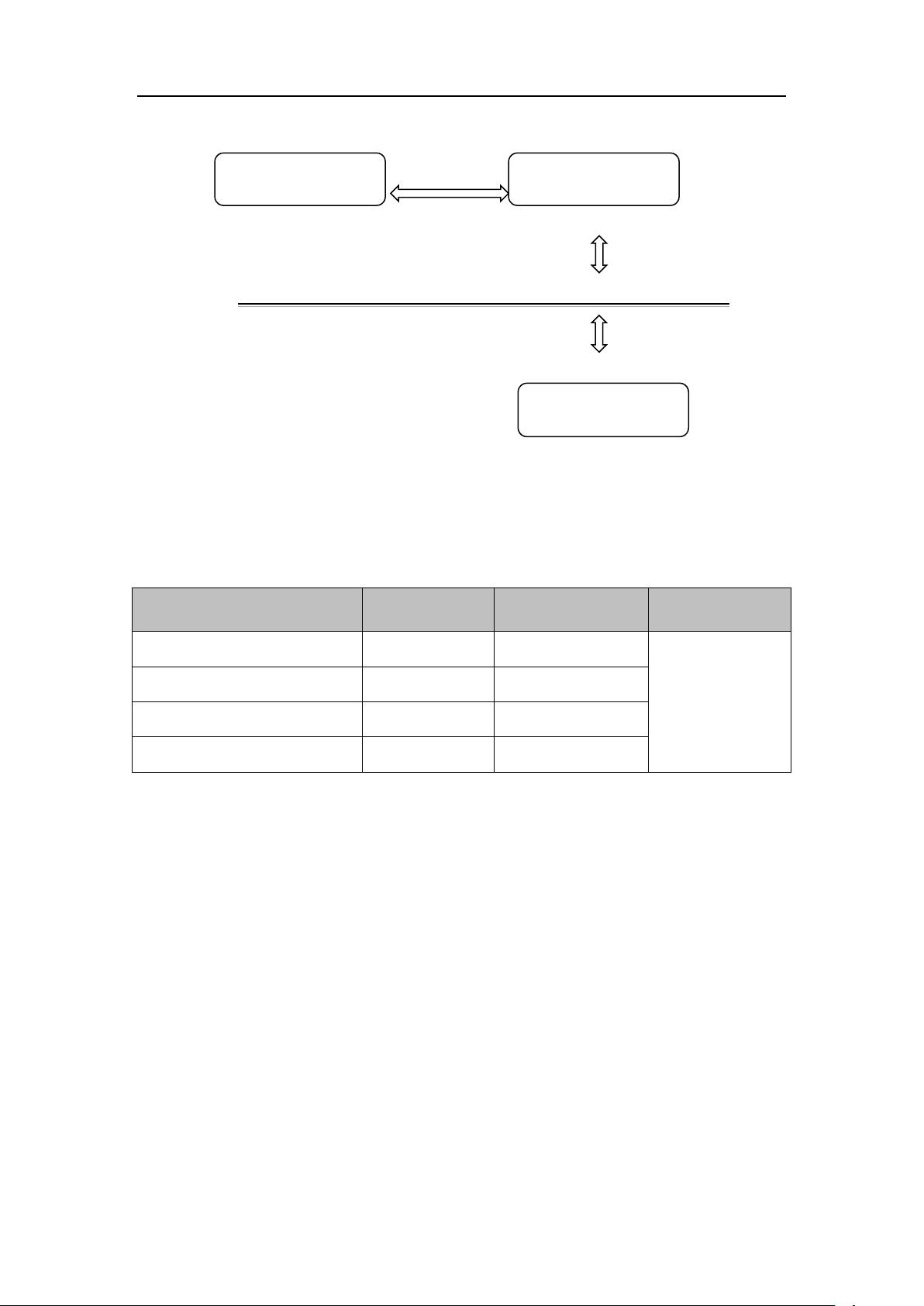
250Kb
CAN2 100Kb
CAN1
250Kb
图 1 网络拓扑图
各个通讯节点的名称、简写及地址分配:
名称
简写
地址
备注
系统控制器 EMU
EMU
0xD0
ISG 电机控制器
MCU1
0xD1
TM1 电机控制器
MCU2
0xD2
TM2 电机控制器
MCU3
0xD3
扩展帧
Calibration
整车
EMU
剩余27页未读,继续阅读
2021-03-23 上传
2022-09-22 上传
2021-09-20 上传
2021-02-16 上传
2021-02-16 上传
2019-10-23 上传
2021-02-16 上传

小米智能生活
- 粉丝: 46
- 资源: 300
 我的内容管理
展开
我的内容管理
展开







最新资源
- 俄罗斯RTSD数据集实现交通标志实时检测
- 易语言开发的文件批量改名工具使用Ex_Dui美化界面
- 爱心援助动态网页教程:前端开发实战指南
- 复旦微电子数字电路课件4章同步时序电路详解
- Dylan Manley的编程投资组合登录页面设计介绍
- Python实现H3K4me3与H3K27ac表观遗传标记域长度分析
- 易语言开源播放器项目:简易界面与强大的音频支持
- 介绍rxtx2.2全系统环境下的Java版本使用
- ZStack-CC2530 半开源协议栈使用与安装指南
- 易语言实现的八斗平台与淘宝评论采集软件开发
- Christiano响应式网站项目设计与技术特点
- QT图形框架中QGraphicRectItem的插入与缩放技术
- 组合逻辑电路深入解析与习题教程
- Vue+ECharts实现中国地图3D展示与交互功能
- MiSTer_MAME_SCRIPTS:自动下载MAME与HBMAME脚本指南
- 前端技术精髓:构建响应式盆栽展示网站
