S7-200SMART运动控制指令详解与常见错误诊断
版权申诉
S7-200SMART的运动控制功能强大,本文档深入介绍了该PLC系统中关于运动控制指令的详细操作与常见错误分析。主要包括以下几个关键指令:
1. AXISx_CTRL指令:
- 当MOD_EN信号变为OFF时,此指令使运动轴停止当前任务,采用预设的减速度停止。
- 每个运动轴需要单独调用一次AXISx_CTRL,确保每个扫描周期内执行。
- 推荐使用SM0.0信号来调用该指令,但需注意DONE位,除AXISx_CTRL指令执行完毕置1外,其他运动指令完成也会置位。
2. AXISx_GOTO指令:
- 仅当START信号上升沿触发时,该指令启动运动轴到指定位置,但只有在运动轴非工作状态下有效,避免运动过程中打断。
- 在执行AXISx_GOTO前,需要检查运动轴是否处于静止状态。
3. AXISx_DIS指令:
- 当DIS_ON为1时,该指令使对应的输出端口Q点置1,允许驱动器准备就绪。
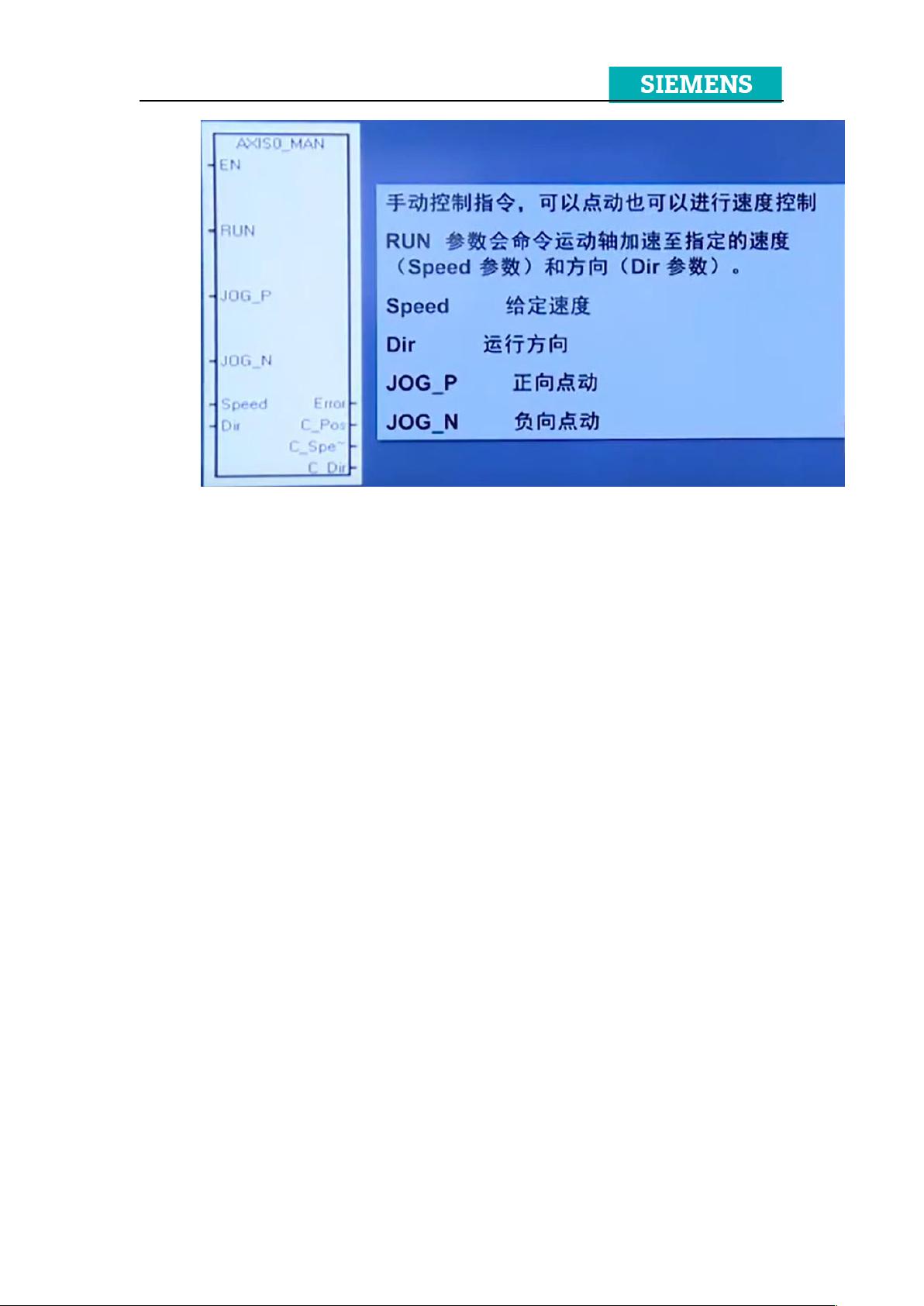
4. AXISx_MAN指令:
- 这个指令用于控制电机速度和方向,RUN、JOG_P、JOG_N管脚不能同时导通。
- 在运行过程中可以实时调整SPEED值,修改轴方向则需在停止后进行。
- 不建议同时激活两个AXISx_MAN指令,并要求EN信号持续导通。
5. AXISx_RUN指令:
- 通过START信号的上升沿触发运行,例如,可以用来执行预设的包络曲线,如QX1,通过V0.1信号触发。
6. 注意事项:
- 指令使用时需遵循特定触发机制,如上升沿触发,且在某些情况下,如绝对位置模式的使用,需要先执行回参考点操作。
- 输入 Profile 管脚的数值编号范围是0-31,确保与系统配置相符。
本文档提供了丰富的实例和注意事项,帮助用户理解如何正确地在S7-200SMART PLC中运用这些运动控制指令,减少错误发生的可能性,从而提高设备的稳定性和生产效率。通过学习和实践这些指令,用户能够更好地掌握S7-200SMART的运动控制功能,实现精确的工业自动化控制。
注意:
该指令中的 RUN、JOG_P、JOG_N 3 个管脚在同一时刻不能同时导通,只能
有一个管脚为 1。
在电机运行过程中,我们可以实时修改 SPEED 管脚的给定速度值;
若要修改 Dir 管脚-即轴的运行方向,前提是必须使轴完全停止才可以,在修
改完 Dir 管脚之后,可以通过 RUN 管脚再次触发 AXISx_MAN 指令。
不可同时使用 2 个 AXISx_MAN 指令
在 AXISx_MAN 指令执行过程中,EN 管脚必须一直导通,不能撤销或断开!
举例说明:
如下图所示,
当 V1.0 为 ON 时,轴 0 会以 VD112 设置的速度和 V1.3 设置的方向开始运行;
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
1424 浏览量
479 浏览量
212 浏览量
552 浏览量
2022-11-17 上传

AAA_自动化工程师
- 粉丝: 7134
- 资源: 3485
 我的内容管理
展开
我的内容管理
展开







