V-M双闭环直流可逆调速系统设计详解及关键技术
版权申诉
本文档主要探讨了V-M双闭环直流可逆调速系统的详细设计。设计任务主要包括以下几个方面:
1. 技术数据与指标:
- 设计对象为一台直流电动机,其功率、电压、电流、额定转速、堵转电流、动态特性以及整流装置的参数如晶闸管数量、电阻和电抗器值都有明确给出。此外,还定义了系统的主要技术指标,如无静差、调速范围、超调量、动态速降和调节时间等,要求达到极高的精度和稳定性。
2. 主电路设计:
- 要求设计者根据技术需求选择合适的主电路结构,包括变压器、电力电子器件(如晶闸管)、平波电抗器以及保护电路等,确保电机能在不同的负载条件下平稳运行,且在大范围的可逆速度调节下电流连续。
3. 动态设计计算:
- ASR(Average Speed Regulator)和ACR(Average Current Regulator)调节器的结构型式选择和参数计算是关键步骤,目标是通过动态校正优化系统性能,使之满足速度和电流响应的快速性和准确性。
4. 设计要求:
- 除了上述技术指标外,设计还需考虑电机的负载适应能力,必须保证在不同负载下都能实现平滑速度调节,同时具备足够的制动功能和过电压、过电流保护措施,以确保系统的安全性和可靠性。
5. 双闭环调速系统原理:
- V-M双闭环系统利用电压和电流两个反馈信号来控制电动机的速度,通过反接法实现电机的可逆运行,克服了传统单闭环系统在反向运行时的问题。
6. 系统设计流程:
- 设计流程涉及系统分析、参数计算、电路选择和配置、动态性能优化以及保护机制的集成,以构建一个既能满足静态精确度又能提供优良动态特性的直流可逆调速系统。
在整个设计过程中,需要综合运用控制理论、电力电子技术和电机理论,确保系统能够高效、稳定地工作在各种工况下。
.
U
*
n
1
+
T
0n
s+ 1
1
+
ASR
T s+ 1
0i
U
*
i
ACR
K
s
T
s
s+ 1
U
d0
U
c
T
0n
s+ 1
-
I
dL
-
1/R
I
d
R
T
m
s
E
1
C
e
n
-
U
n
-
U
i
T
l
s+ 1
+
T
0i
s+ 1
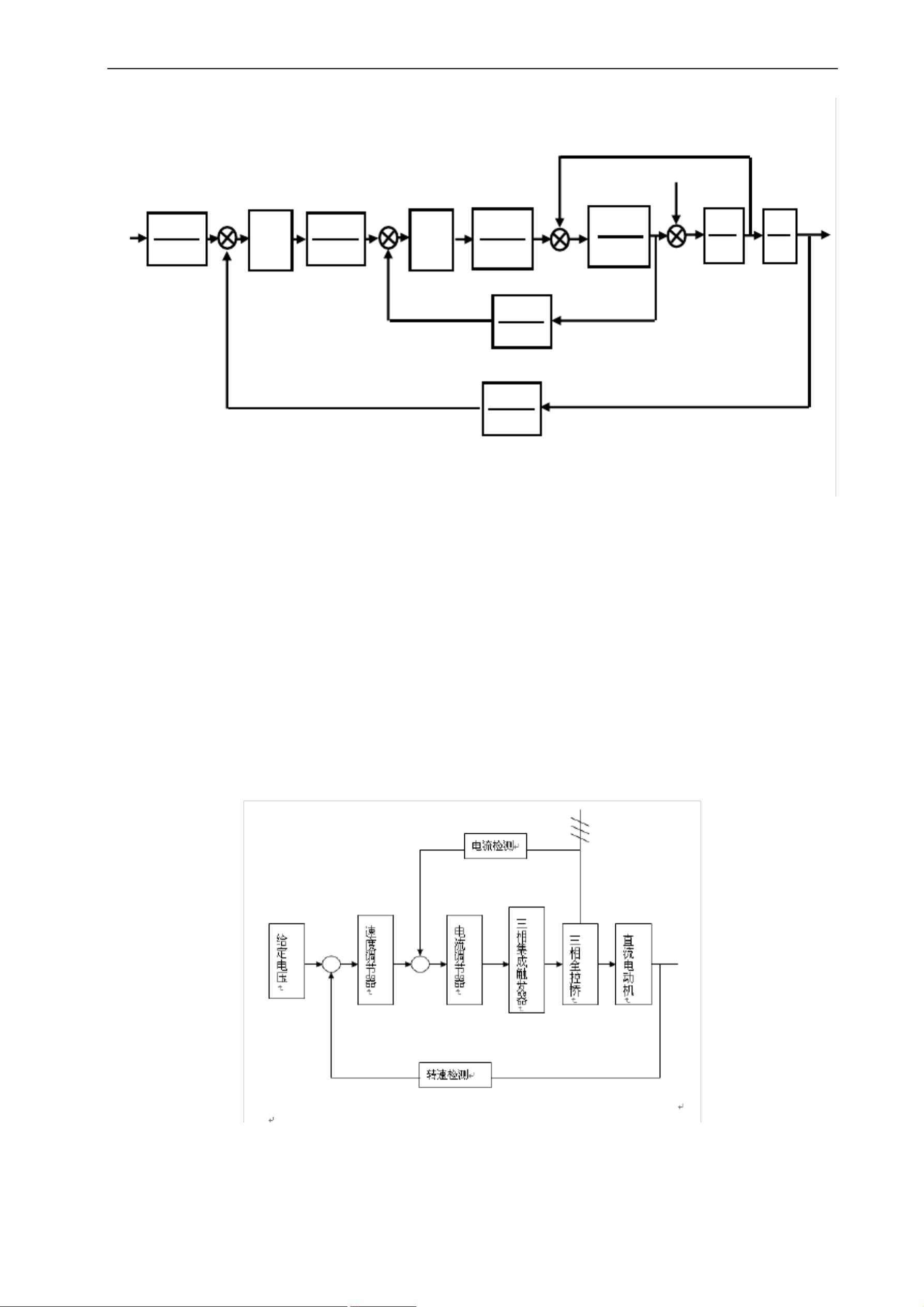
图 3 双闭环调速系统结构框图
2.2 主电路的设计
2.2.1 主电路电气原理图及其说明
主电路采用转速、 电流双闭环调速系统, 使电流环 (ACR) 作为控制系统的内环,
转速环 (ASR) 作为控制系统的外环,以此来提高系统的动态和静态性能。 二者串级
连接,即把电流调节器的输出作为转速调节器的输入,再用转速调节器的输出去
控制电力电子变换器 UPE 。从而改变电机的转速。 通过电流和转速反馈电路来实现
电动机无静差的运行。
图 4 系统电气原理框图
.
剩余15页未读,继续阅读
303 浏览量
点击了解资源详情
点击了解资源详情
2023-11-02 上传
131 浏览量
2022-07-06 上传
128 浏览量
2021-12-17 上传

hhappy0123456789
- 粉丝: 76
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ruby语言集成Mandrill API的gem开发
- 开源嵌入式qt软键盘SYSZUXpinyin可移植源代码
- Kinect2.0实现高清面部特征精确对齐技术
- React与GitHub Jobs API整合的就业搜索应用
- MATLAB傅里叶变换函数应用实例分析
- 探索鼠标悬停特效的实现与应用
- 工行捷德U盾64位驱动程序安装指南
- Apache与Tomcat整合集群配置教程
- 成为JavaScript英雄:掌握be-the-hero-master技巧
- 深入实践Java编程珠玑:第13章源代码解析
- Proficy Maintenance Gateway软件:实时维护策略助力业务变革
- HTML5图片上传与编辑控件的实现
- RTDS环境下电网STATCOM模型的应用与分析
- 掌握Matlab下偏微分方程的有限元方法解析
- Aop原理与示例程序解读
- projete大语言项目登陆页面设计与实现
