CAN FD总线详解:提升汽车通信与物联网硬件工程师必备技术
版权申诉
74 浏览量
更新于2024-09-07
收藏 382KB DOC 举报
CANFD总线是CAN(Controller Area Network)总线的一种扩展版本,针对汽车行业中因功能增加而带来的CAN总线性能瓶颈进行优化。CAN原本作为车载通信标准,由于其最大速率仅为1Mbit/s,且带宽利用率低、响应机制受限于物理布线等因素,无法满足新能源汽车等复杂系统中大量数据交换的需求。
CANFD全称CAN with Flexible Data Rate,旨在解决CAN的局限性。它在以下几个方面做出了改进:
1. **传输速率**:CANFD支持可变传输速率,从控制场中的BRS位到ACK场之前的部分可以达到8Mbps,远高于传统的500kbit/s,提供了更高的数据传输效率。这部分的速率变化范围允许在CAN FD协议内灵活调整。
2. **数据长度**:CANFD报文的最大长度扩展到了64字节,比CAN的11位ID长度的限制更为适应现代车辆中的数据密集应用。
3. **帧格式**:新增了FDF(Frame Format)、BRS(Bit Rate Switching)和ESI(End of Silent Interval)位。FDF用来区分CAN和CAN FD报文,BRS用于控制速率切换,ESI则指示发送节点的状态。
4. **兼容性**:尽管CANFD提供了更先进的特性,但它保持了一定的向后兼容性,CAN FD节点能接收CAN报文,反之则不行,因为CAN节点的帧格式设计不支持CAN FD报文。
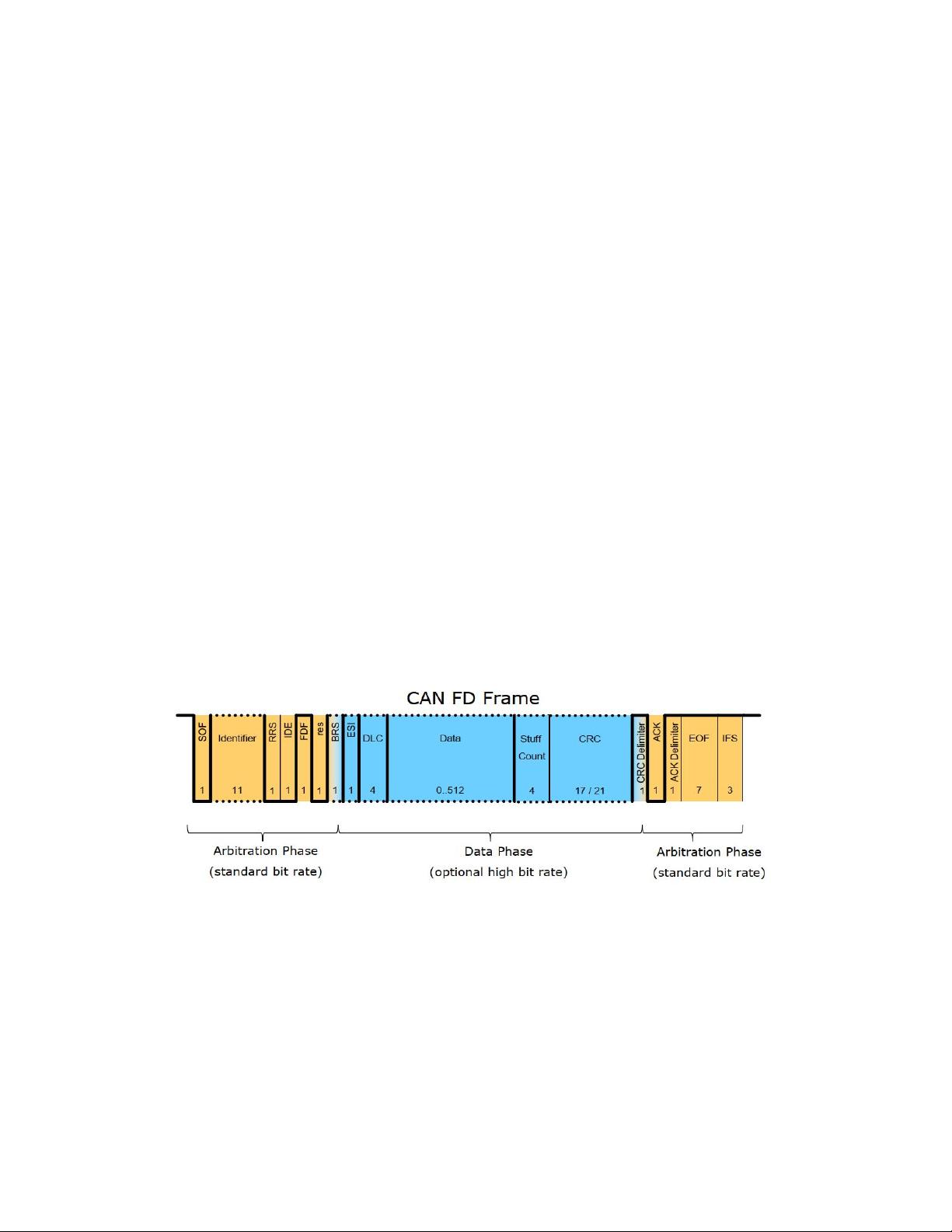
5. **帧结构**:CAN FD沿用了CAN的基本帧结构,包括SOF(Start of Frame)、仲裁段、控制段、数据域、CRC域和ACK域,但取消了远程帧支持并引入了RRS位。同时,控制域中添加了FDF、BRS和ESI三位。
总结来说,CANFD通过提升传输速率、扩大数据长度和改进帧格式,为汽车电子系统提供了一个更高效、更灵活的通信平台。然而,它的广泛应用仍需要注意与其他CAN节点的兼容性问题,确保通信的稳定性和互操作性。硬件工程师在设计新能源汽车的通信网络时,需要考虑CANFD的这些特性,以满足车辆控制和数据共享的高性能需求。
一文搞懂 CANFD 总线
随着汽车功能越来越多,CAN 总线的局限性也逐渐暴露:
1、CAN 总线最高速率为 1Mbit/s,通常使用的是 500k,随着功能的逐渐增
多,各 ECU 之间的信息交互也越多,导致总线负载持续走高;
2、CAN 报文中只有约 40~50%的带宽用于实际数据传输;
3、响应机制受车内布线的物理特性限制,例如 CAN 控制器中的 ACK 生成延
迟;收发器传播延迟;导线延迟等。
为了解决上诉 CAN 总线的局限性,对其进行升级时必不可少的,从而有了
CAN FD,其全称为 CAN with Flexible Data rate。
2011 年,开始 CAN FD 协议的开发,2015 年 ISO11898-1 进行了修订,将
CAN FD 加入其中。
相对于 CAN,CAN FD 有什么不同呢?
1、传输速率不同。CAN FD 的速率可变,从控制场中的 BRS 位到 ACK 场之
前(含 CRC 分界符)为可变速率,最高速率可达到 8Mbps(下图的蓝色部
分)。其他部分与 CAN 相同。
2、数据长度不同。CAN FD 支持的最大数据长度为 64byte。
3、帧格式不同。CanFD 新增了 FDF、BRS、ESI 位:
... FDF:表示 CAN 报文还是 CAN-FD 报文;
... BRS:表示位速率转换,该位隐性时,速率可变(即 BSR 到 CRC 使用转换
速率传........输),该位为显性时,以正常的 CAN-FD 总线速率传输(恒定速
率);
... ESI:表示发送节点状态。
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-22 上传
2021-09-22 上传
2021-09-22 上传
2021-09-22 上传
2021-09-22 上传
2021-09-22 上传









