MATLAB平台下的平面四杆机构运动分析系统设计与实现
本文主要探讨了在MATLAB环境下开发一种平面连杆机构(平面四杆机构)的运动分析系统。作者隶属于机电学院,专业为机械设计制造及其自动化,他们的研究工作聚焦于利用MATLAB这一强大的数值计算和图形处理工具,来建立四杆机构的运动学模型。通过参数化设计与交互式设计相结合的方式,他们构建了一个用户友好的软件平台。
论文的核心部分首先介绍了数学建模的过程,针对平面连杆机构的特性,如杆件长度、关节角度等参数,设计出一套精确的运动方程。MATLAB作为编程基础,其丰富的函数库和可视化功能使得复杂计算变得简单,同时也支持算法的优化和调试。
设计的软件不仅提供了输入参数的界面,用户可以轻松输入杆件的尺寸和初始条件,软件会立即进行运动分析并生成结果。这种实时反馈极大地提高了设计效率,使设计师能够快速验证和调整设计方案。此外,界面设计程序确保了用户体验,使得分析结果以直观、清晰的方式呈现,便于设计师理解机构的行为。
通过对分析结果与设计需求的对比,设计师能够根据软件提供的信息,明智地决定是否需要对机构进行改动,或者寻找优化方案。因此,这个MATLAB为基础的平面连杆机构运动分析系统为四杆机构的设计者提供了一种实用的工具和方法,显著提升了设计过程中的精度和效率。
论文的结构包括引言、数学模型建立、软件设计与实现、用户界面与交互、结果验证以及结论等部分。通过深入研究MATLAB在机构运动分析中的应用,作者不仅展示了技术实力,也为相关领域的研究人员和工程实践者提供了宝贵的学习和参考资源。关键词包括平面四杆机构、MATLAB软件、运动分析以及分析方法,这些都是本文的核心内容和贡献点。

就是他所面对的应用程序, 对图形界面的操作直接影响应用程序的应用前途。
对于以往专门用于科学计算的语言, 如 FORTRAN 语言等, 编写图形界面的功能
较弱, 因而用其开发的程序, 其界面往往不够友好, 用户使用起来很不方便。而
目前流行的可视化语言, 对科学计算的功能又相对弱一些。MATLAB 提供了非
常强大的编写图形用户界面的功能。用户只和前台界面下的控件发生交互,而
所有运算、绘图等内部操作都封装在内部,终端用户不需要区追究这些复杂过
程的代码。图形用户界面大大提高用户使用 MATLAB 程序的易用性。因此,学
习 MATLAB 图形用户界面编程,即 GUI 程序的创建,是 MATLAB 编程用户应
该掌握的重要一环。
对于一个 MATLAB 的图形用户界面, 它的设计过程可以分为两个部分:
(1)用户界面的外观设计。在这里, 主要是通过不同的对话框、按钮、文本
框等许多工具的使用, 设计出一个图形用户界面。同时也应搞清楚这个图形界
面的功能是什么, 也即在图形界面上的操作会引发什么样的结果。
(2)图形界面的完成。在这里, 用户将根据在外观设计阶段所确定的图形界
面的功能, 针对各个不同的图形对象来编写出能够实现该功能的函数代码, 确保
这个图形界面能够完成所预定的功能。
工程人员通过使用 MATLAB 提供的工具箱, 可以高效求解复杂的工程问题,
并可以对系统进行动态仿真, 用强大的图形功能对数值计算结果进行显示。笔
者在 MATLAB 环境下开发了一个平面四杆机构运动分析系统 ,只要在系统图形
界面的文本编辑框中交互地输入四杆机构各构件的参数和原动件的角速度 ,就能
迅速地输出当原动件转动 1 周时从动件的位移、速度、加速度的变化规律曲线 ,
具有融计算与绘图为一体 ,操作简便、界面友好 ,计算速度快 ,准确性高的特点。
本文以曲柄摇杆机构为分析对象,借助 MATLAB 软件进行运动分析。曲柄摇杆
机构是平面四连杆机构中最基本的结构,它可以用来实现转动和摆动之间运动
形式的转换或传递动力。对曲柄摇杆机构进行运动分析的主要内容是:在机构
尺寸参数已知的情况下,假定曲柄做匀速转动,从运动几何关系上分析连杆和
摇杆的角位移、角速度、角加速度等运动参数的变化情况。并根据机构闭环矢
量方程计算从动件的位移偏差。
本课题的主要内容是平面四杆机构的连杆曲线及轨迹综合分析系统的开发,
其意义在于:
一、深入研究计算机在设计和仿真连杆机构曲线方面的应用,从而指导实践;
二、总结出四杆机构轨迹综合的理论基础,从而指导多杆或复杂的低副平面
机构的综合。
三、综合运用 MATLAB 软件强大的计算功能与图形界面开发系统,设计出
可以方便快捷实现机构分析的应用系统
2 平面连杆机构的设计分析
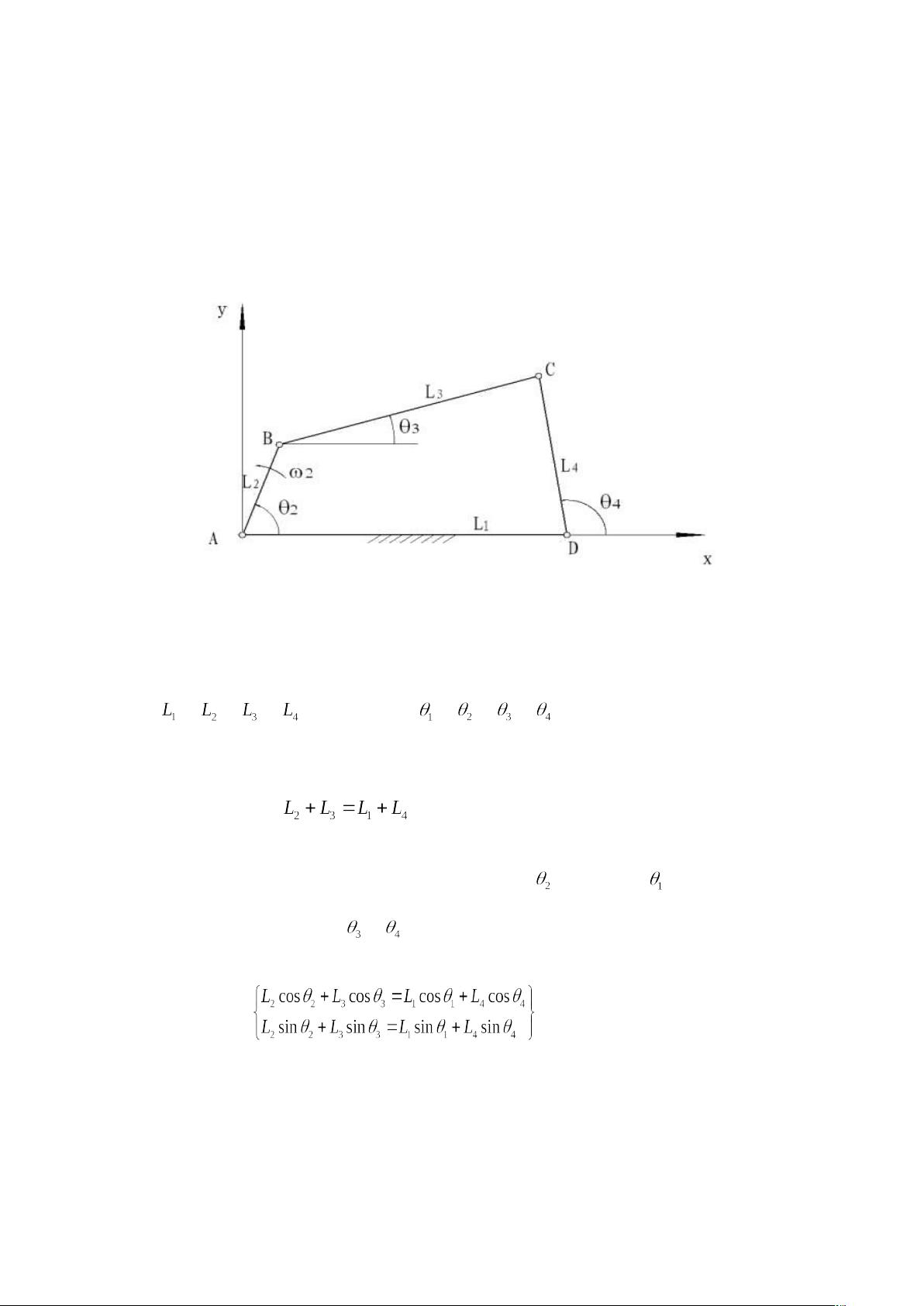
2.1 平面四连杆机构的运动分析
[4]
在平面四杆机构中,其具有曲柄的条件为:
a.各杆的长度应满足杆长条件,即:
最短杆长度+最长杆长度≤其余两杆长度之和。
b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架
2
剩余25页未读,继续阅读
2022-07-05 上传
2022-12-02 上传
2024-01-08 上传
2024-10-26 上传
2024-10-27 上传
2024-11-11 上传
2024-10-26 上传
2024-11-11 上传
2024-05-09 上传

kjing1999
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
