遗传算法优化PID控制器参数MATLAB实现
版权申诉
86 浏览量
更新于2024-06-27
收藏 250KB DOCX 举报
"基于遗传算法的PID参数整定的MATLAB程序代码,旨在解决传统PID控制器参数整定的困扰,通过遗传算法实现全局最优的控制器优化。"
文章深入介绍了基于遗传算法的PID参数整定方法,针对传统PID控制器在参数整定过程中依赖人工试凑、耗时且无法自适应的问题,提出了一种智能优化解决方案。PID控制以其简单性和稳定性在工业控制中广泛应用,但在实际应用中,参数整定往往成为一项挑战。遗传算法作为一种源于生物进化理论的优化工具,因其全局优化能力和无需对目标函数微分的特性,成为了PID参数整定的理想选择。
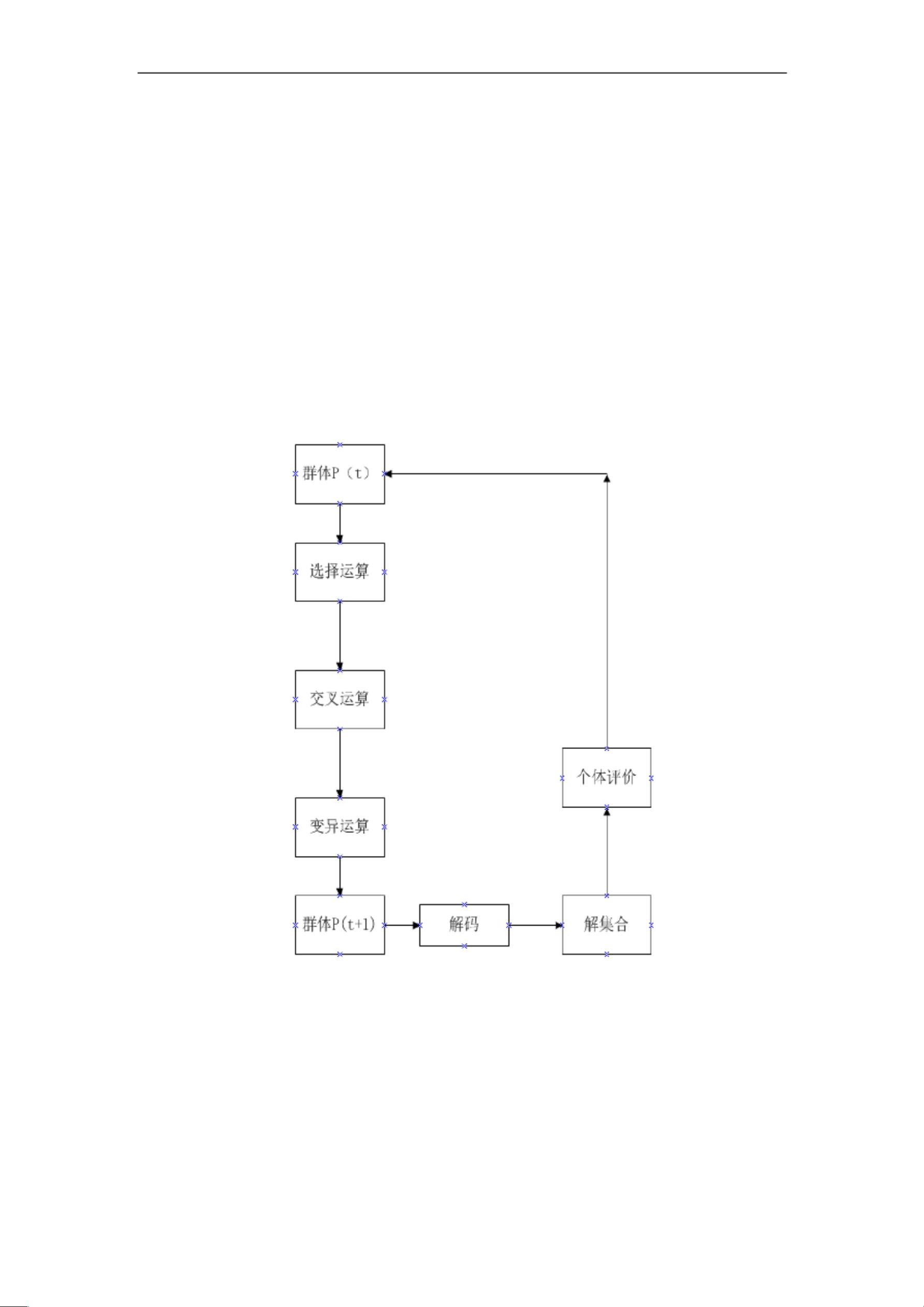
遗传算法的基本原理包括遗传、变异和选择三个核心概念,模拟生物进化过程中的适者生存原则。在算法中,待优化的参数被编码成个体,形成群体,通过适应度函数评估每个个体的优劣。经过选择、交叉和变异等遗传操作,逐步演化出适应度更高的个体,直到找到最优解。这种过程不受搜索空间限制,适用于解决复杂问题的全局优化。
在MATLAB环境中实现基于遗传算法的PID参数整定,能够自动调整控制器的增益参数,适应被控对象特性的变化,无需人工介入。这种方法在实际案例中表现出优于传统方法的优化效果,简化了控制系统的调试过程,提高了控制性能。
此外,遗传算法的鲁棒性也是其优势之一,即使面对不确定性和噪声,也能保持稳定的表现。在实际工程应用中,遗传算法的PID参数整定策略可以广泛应用于各种动态系统,为控制系统的优化提供了一种有效的自动化工具。结合MATLAB强大的计算能力和图形化界面,用户可以更加便捷地实现控制器设计和调试,从而提升工业控制系统的效率和精度。
《智能控制》
图 1 遗传算法的运算过程
4.2 基于遗传算法整定 PID 参数的步骤
剩余16页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-03-03 上传
2022-11-19 上传
2022-11-11 上传
2024-04-19 上传
2022-11-23 上传
2022-05-27 上传

G11176593
- 粉丝: 6917
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- VC++实现的多线程系统清理程序
- pytest-rerunfailures:一个pytest插件,最多可重复运行-n次失败的测试,以消除flakey失败
- hyperblog:Un Blog increative para el curos de GitHub de Platzi
- totm2:期待已久的续集..
- Sleep-Display:一个简单的 Mac OS 应用程序,可将显示器置于睡眠模式并自行退出
- inverte-api:这是用于与inverte-react-web进行交互的快递服务器
- VC实现的类似Windows Netstat命令查看开放端口的
- 电信设备-农业信息资源池管理系统.zip
- Professional-pagination-using-react-without-JSX:在没有JSX的情况下使用react进行专业分页
- social-proof-section
- nodeinjector:用 C++ 编码的 node.js dll 注入器模块
- 硬盘安装linux EFI分享
- 简化GDI写法的VC++程序
- ClientesApp
- 2-求职简历-word-文件-简历模版免费分享-应届生-高颜值简历模版-个人简历模版-简约大气-大学生在校生-求职-实习
- symfony-blog:符号博客项目
