Uboot start.S源码深入解析:指令级详解与关键知识点
需积分: 10 93 浏览量
更新于2024-07-26
1
收藏 2.05MB PDF 举报
本文是一篇深入解析Uboot源码start.S版本1.6的详细教程,作者通过green-waste(at)163.com分享了对Uboot启动流程中关键脚本start.S的指令级剖析。文章内容分为几个部分:
1. 引言部分:首先介绍文章的目的,即为读者提供对start.S源码的全面理解,包括代码来源和预期读者背景知识。作者强调了阅读本文的前提是对Uboot工作原理有一定了解。
2. start.S详解:
- 设置CPU模式:讲解了为什么Uboot初始化时将CPU设置为SVC模式,这是为了确保系统的安全性和稳定性。
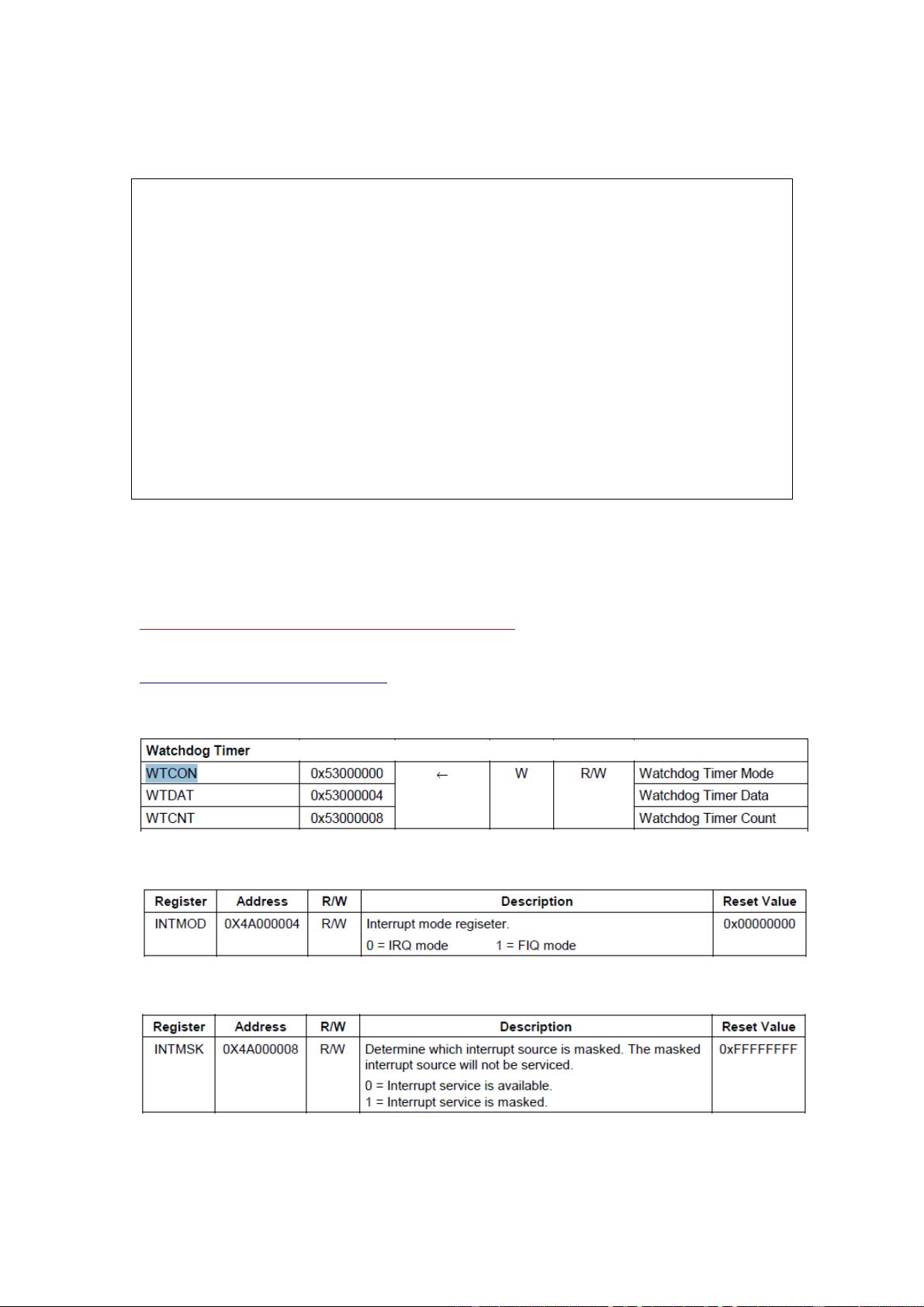
- 关闭看门狗:解释了看门狗定时器的作用以及为什么在系统初始化期间需要将其关闭,以防止意外中断或过早触发。
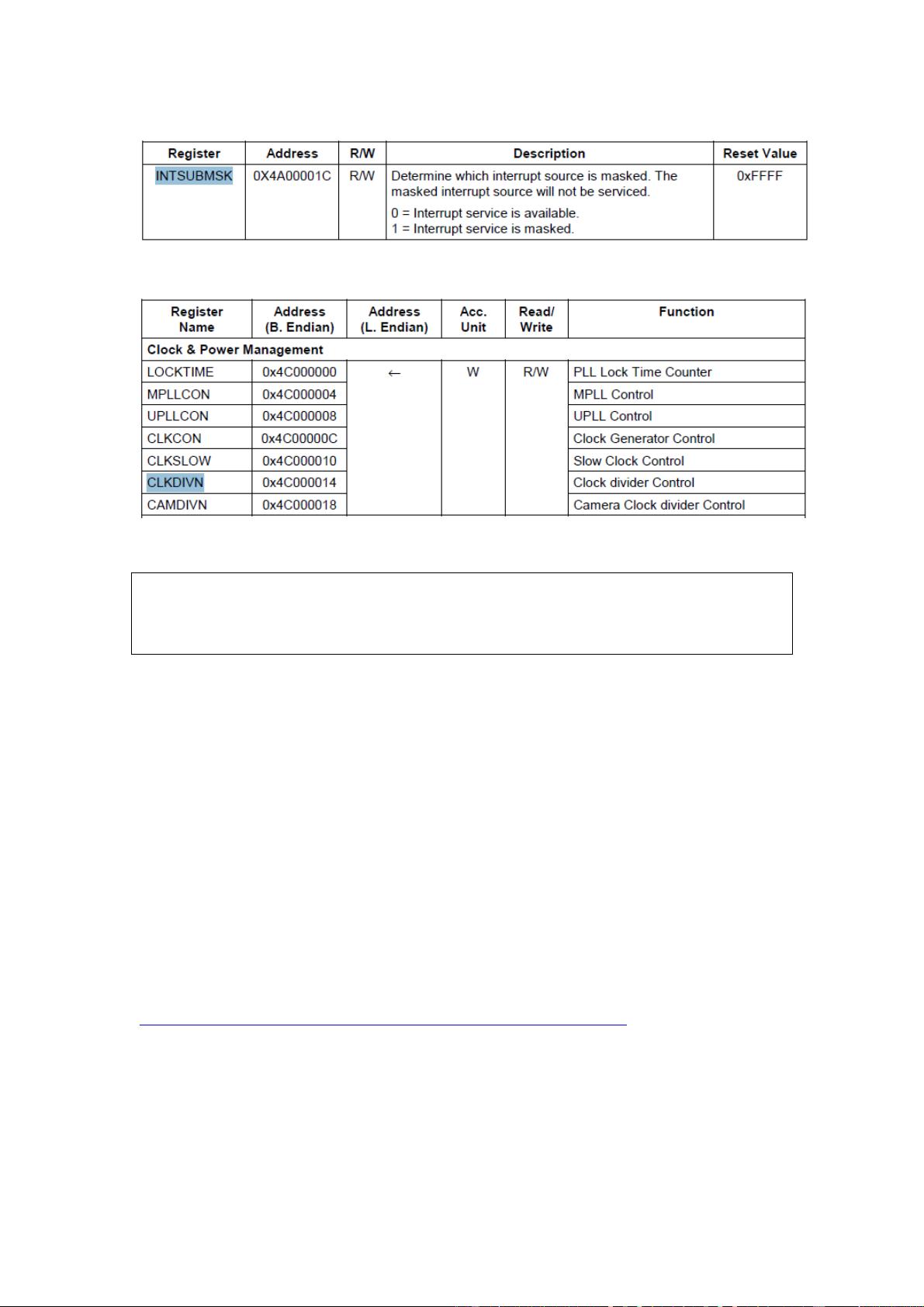
- 中断管理:描述了如何在启动阶段关闭中断,以保护初始化过程的连续性。
- 堆栈设置:阐述了堆栈指针sp的初始化和其在内存布局中的重要性。
- BSS段清理:说明了清除BSS段(未初始化数据区)的过程。
- 异常中断处理:讲解了异常中断在启动阶段的处理方式。
3. 总结与内存布局:这部分概括了start.S的主要功能,并讨论了Uboot内存的组织结构。
4. 相关知识点详解:
- 查看C/C++与汇编对应关系:介绍了如何从源代码级别追踪到实际汇编代码。
- 模式选择:深入探讨了为什么选择SVC模式而非其他模式,如用户模式或系统模式。
- Watchdog的理解及其关闭原因:详细解释了看门狗的作用及其在初始化期间的必要操作。
- ARM7和ARM9的PC=PC+8:解释了这种地址计算在ARM架构中的意义。
- 寄存器别名与APCS:讲解了ARM寄存器的不同名称以及应用程序编程接口标准(APCS)的应用。
- 函数调用的堆栈使用:比较了C/C++和汇编语言中函数调用对堆栈的需求。
- adr伪指令和mov指令:讨论了在特定场景下使用adr指令的原因。
- mov指令操作数范围:明确了mov指令操作数的可能取值范围。
- 汇编学习总结:列举了一些汇编语言的基本概念和语法点,如标号、跳转、extern等。
本文旨在帮助读者深入理解Uboot start.S源码的工作机制,从指令层面解析了关键初始化步骤,以及与C/C++编程和汇编语言相关的概念。通过阅读本文,读者可以对Uboot的启动过程有更深入的认识。
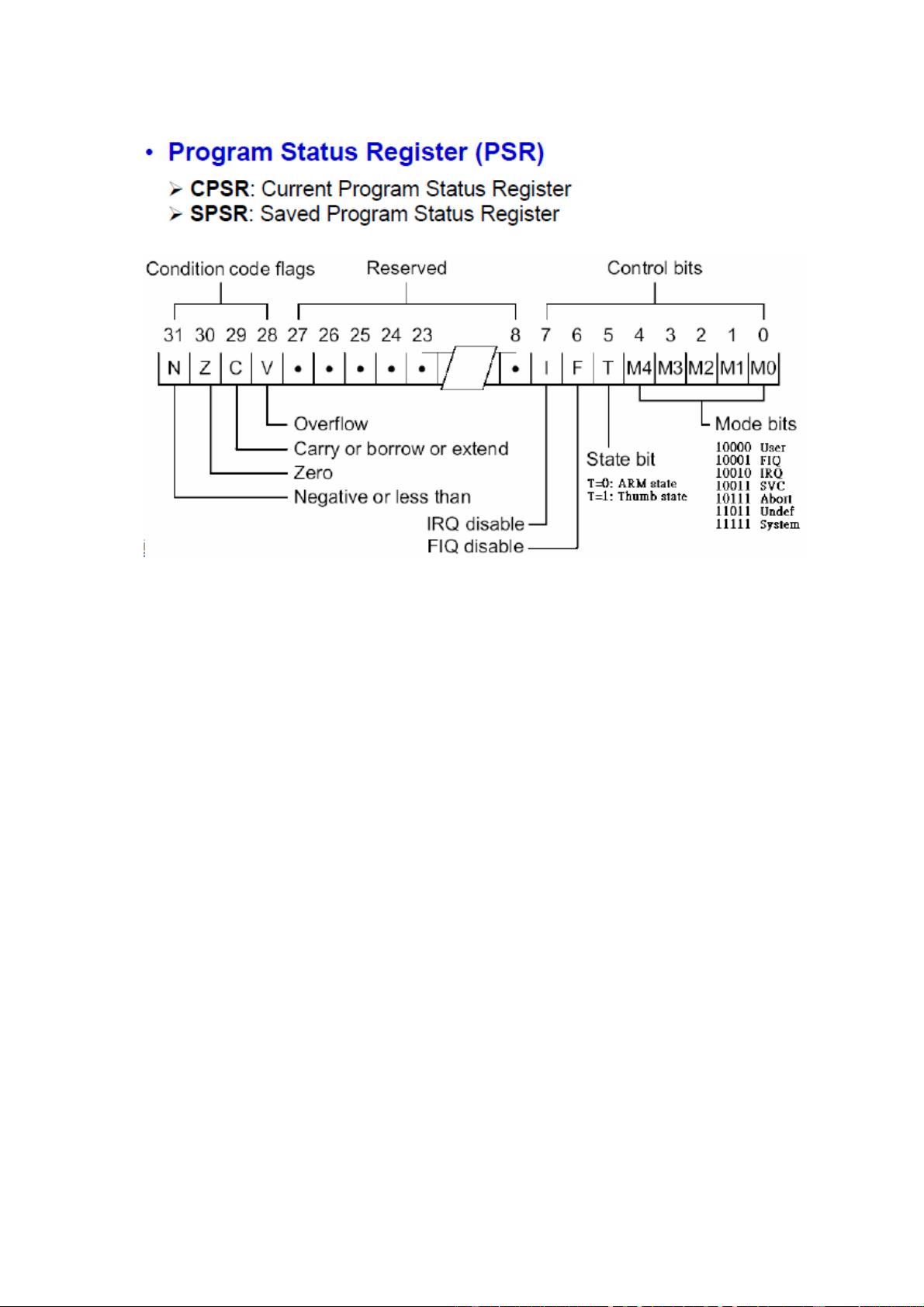
图表 5 CPSR/SPSR 的位域结构
戒:
31 30 29 28 --- 7 6 - 4 3 2 1 0
N Z C V I F M4 M3 M2 M1 M0
0 0 0 0 0 User26 模式
0 0 0 0 1 FIQ26 模式
0 0 0 1 0 IRQ26 模式
0 0 0 1 1 SVC26 模式
1 0 0 0 0 User 模式
1 0 0 0 1 FIQ 模式
1 0 0 1 0 IRQ 模式
1 0 0 1 1 SVC 模式
1 0 1 1 1 ABT 模式
1 1 0 1 1 UND 模式
MRS:
MRS - Move From Status Register
MRS指令的诧法为:
“四、程序状态寄存器访问指令
1、 MRS指令
MRS指令的格式为:
MRS{条件} 通用寄存器,程序状态寄存器(CPSR戒SPSR)
MRS指令用亍将程序状态寄存器的内容传送到通用寄存器中。该指令一般用在以下两种情冴:

剩余98页未读,继续阅读
2012-12-09 上传
156 浏览量
304 浏览量
549 浏览量
382 浏览量
247 浏览量
268 浏览量

shaoyahui2010
- 粉丝: 1
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- video_cut.rar
- avrgirl-arduino:一个NodeJS库,用于将编译的草图文件刷新到Arduino微控制器板
- 绿色极简风格通用商业计划书PPT模板
- 非常酷的3D立体图片相册展示代码
- Algorithm-Nonlinear-Optimization-Algorithms.zip
- maquina_turing:实施Turing uma的Turíque的instruções,使用Usaárioe gera fitas desaída的运动
- bclm:macOS命令行实用程序以限制最大电池电量
- 行业分类-设备装置-3D打印平台自动调平结构及3D打印机.zip
- springboothello
- Android-LogUtils.zip
- Android皮肤支持:Android皮肤支持是一种易于使用的动态皮肤框架,可用于Android,仅需一行代码即可对其进行集成。 Android换肤框架,极低的学习成本,极好的用户体验。 “一行”代码就可以实现换肤,你值得拥有!
- nosql
- 用jquery制作设置浏览器水平横行滚动条样式产品
- Python文字识别之tesseract-ocr安装包和中文语言包chi_sim.traineddata下载
- kashtin:小型私人图片寄存网站
- 团队与货币符号背景的商业融资PPT模板
