TwinCAT NC PTP 实用教程:配置与调试指南
需积分: 15 157 浏览量
更新于2024-07-09
收藏 11.72MB PDF 举报
"11TwinCAT NC PTP 实用教程V3.pdf 是一份关于倍福(Beckhoff)公司TwinCAT运动控制系统的详细教程,涵盖了TwinCAT NC PTP(Point-to-Point,点对点)技术的各个方面,包括系统概述、轴配置、调试方法以及PLC程序的编写等核心内容。"
TwinCAT NC PTP系统是Beckhoff自动化技术中的一个重要组成部分,用于精确控制机器人的运动路径。本教程首先介绍了TwinCAT NC PTP系统与TwinCAT PLC的关系,强调了它们在自动化控制系统中的协同工作方式。NC PTP能够控制多种类型的轴,如直线轴、旋转轴等,并且详细说明了轴的数量限制和控制周期,这些都是保证高精度和高效运动控制的基础。
在轴的配置部分,教程逐步指导用户如何添加、设置和管理NC轴。这包括了编码器设置(用于位置检测)、驱动器设置(关联电机参数)、控制参数设置,以及通过ADS(Automation Device Specification)信息进行通信。此外,教程还介绍了NC轴与PLC程序之间的对应关系,以及轴的导出和导入功能,便于项目的备份和迁移。
轴的调试是整个教程的重点之一。通过轴调试界面,用户可以深入了解轴的各个状态和参数,包括一般信息、设置、参数、动态、在线、功能、耦合和补偿等。教程详细解释了如何进行轴的启用、点动操作,以及功能测试,帮助用户确保轴的正常运行。此外,教程还深入探讨了动态性能调试、齿轮联动和凸轮联动,这些对于实现复杂的运动控制序列至关重要。
在PLC编程方面,教程提供了编写NC单轴控制程序的步骤,包括准备工作如引用库文件、声明变量,以及PLC程序的结构和逻辑。特别地,教程展示了如何管理轴的使能状态,如MC_Power和MC_Reset等关键指令,这些都是PLC与NC轴交互的核心。
这份TwinCAT NC PTP实用教程为工控领域的专业人士提供了一个详实的学习资源,无论是对系统架构的理解,还是实际操作技巧的掌握,都能从中受益匪浅。通过学习,用户将能够有效地利用TwinCAT NC PTP技术来设计和实现高精度的自动化运动控制解决方案。
TwinCAT NC PTP 实用教程
- 16 -
Encoder Evaluation
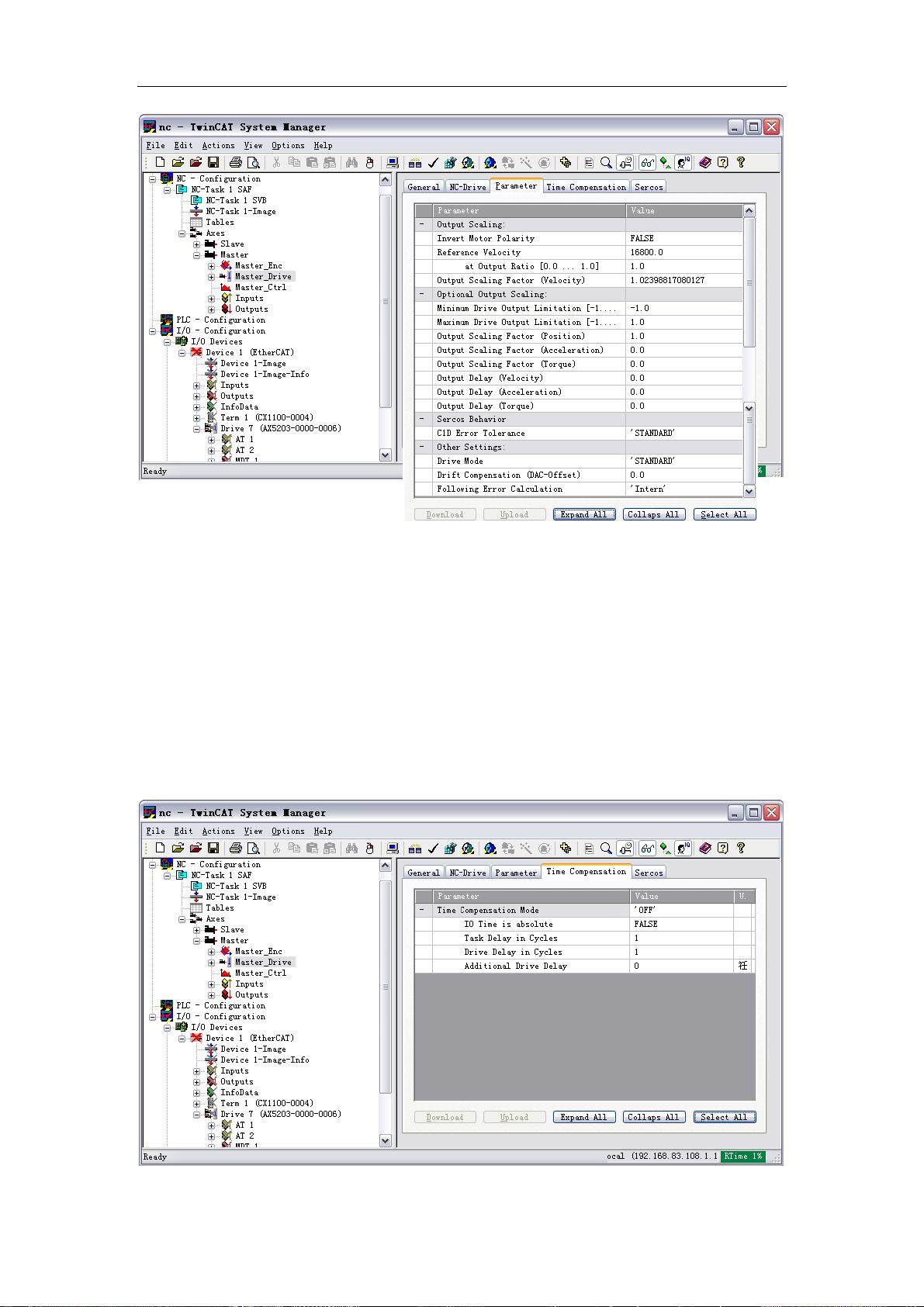
Invert Encoder Counting Direction:编码器计数方向取反,默认为 False,如果希望电机正向
转动的而位置反馈值减小,就需要置为 True,同时也应将电机极性取反(Axis 下 Drive 的
Parameter 页面 Invert Motor Polority 项)。
Scaling Factor:每个位置反馈的编码器脉冲对应的距离。比如:电机转动一圈 1048576 个
脉冲,而电机转动一圈对应 360mm,则 Scaling Factor 应为 360/1048576=0.000343323
mm/Inc.
提示:对于空载调试,习惯上,把一圈设置为 60mm,这样,1mm/s 的速度就相当于 1 圈
/min。因为电机的额定速度单位是 rpm,调试时以 rpm 为速度单位比较直观。
Position Bias:NC 的坐标原点与电机编码器零位之间的偏移,机械安装固定后,此值就不
变。仅当使用绝对编码器时,才需要设置此项。
Modular Factor:模长。通常指一个工艺周期 Axis 运动的距离。对于不用在一个模长范围
内定位的轴,不用设置。不带负载调试时,常用电机转动一圈的距离模长,比如 360mm。、
Reference System:参考点坐标系,使用默认值。
Homing:
Invert Direction for Calibration Cam:反向寻参。
Invert Direction for Sync Impuls Search:反向等待同步脉冲。
Calibration Value:参考点位置。
Reference Mode:寻参模式。在 4.4 章节 “寻参 MC_Home”有详细描述各种模式的区别。
Other Settings:
Encoder Mode:编码器模式,有以下三种选项,
Pos:编码器只用于计算位置,当位置环在驱动器内时使用。
PosVelo:编码器只用于计算位置和速度,当位置环在 TwinCAT NC 时使用。
PosVeloAcc:TwinCAT NC使用编码器来确定位置、速度和加速度时选用。
说明:要从 Scope View 监视到加速度,Encoder Mode 必须选择为 PosVeloAcc。
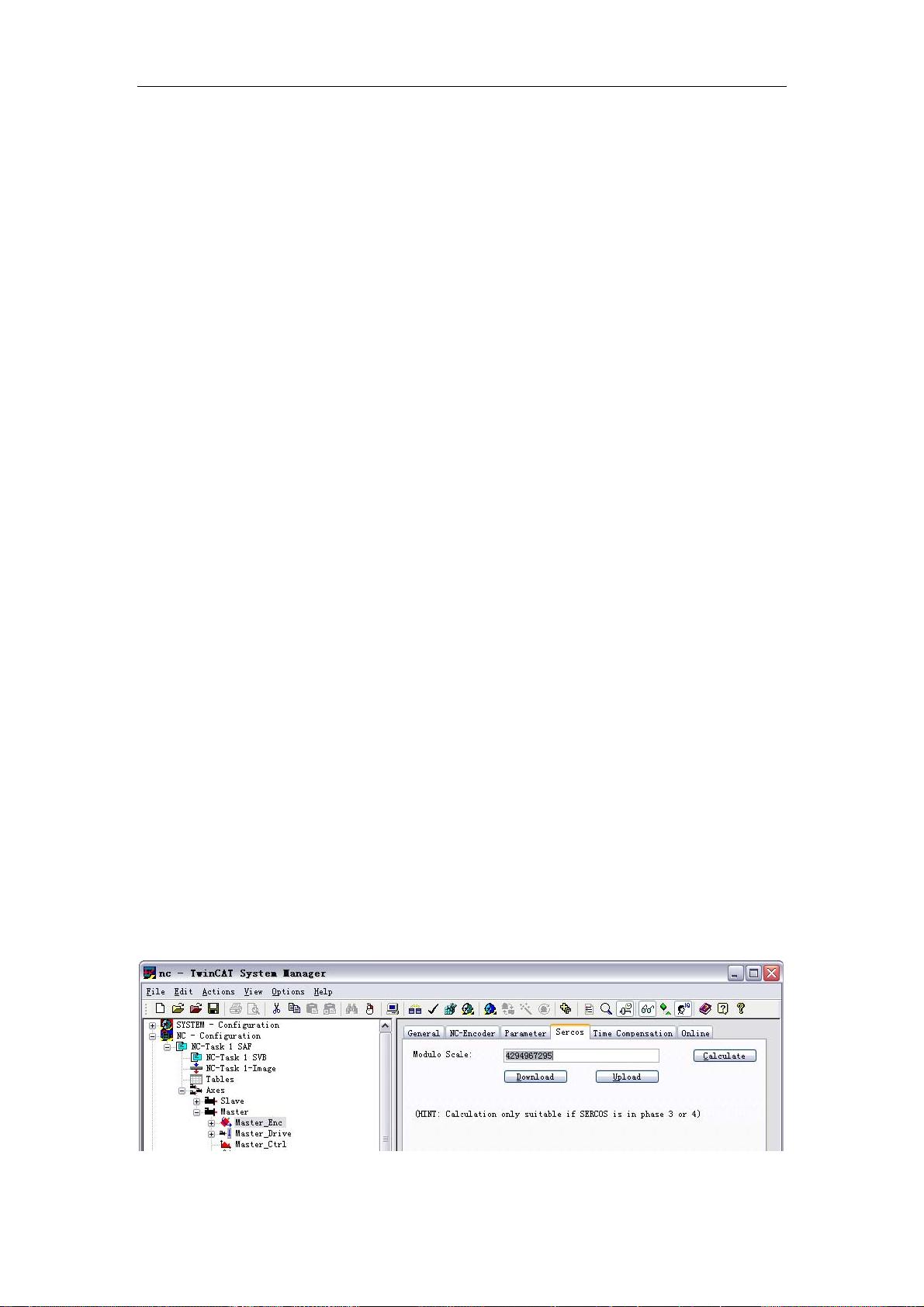
z Sercos
Sercos 编码器默认的 modular Scale 值 为 2 的 32 次方 即 4294967295,只有 SERCOS 或者
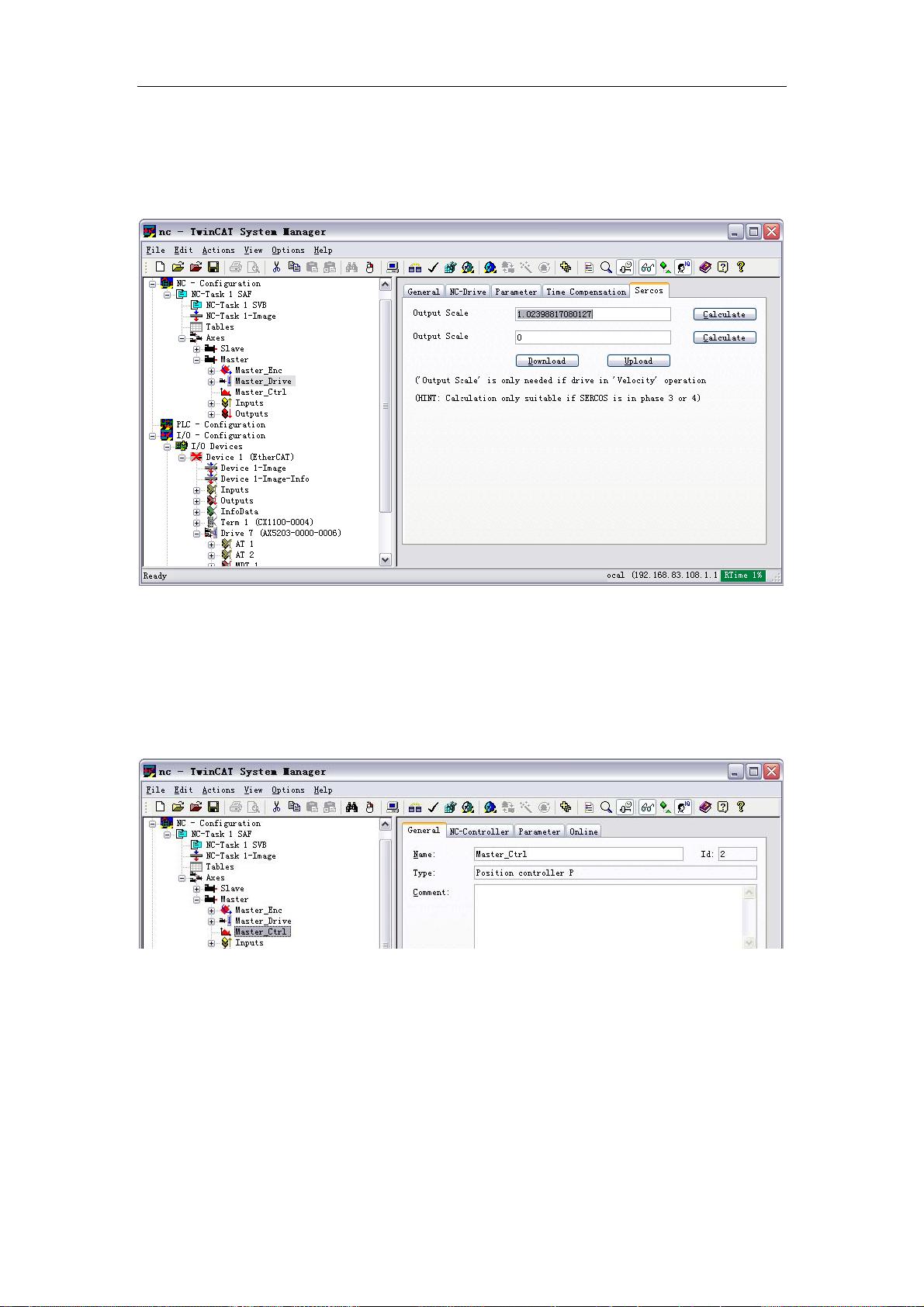
剩余225页未读,继续阅读
2015-10-13 上传
2019-12-20 上传
2020-03-30 上传
2017-08-22 上传
2015-06-08 上传
159 浏览量

小脚冰凉吖
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
