ROS2实时控制系统解析:RealtimeROS2实战
"ROS实时性介绍 RealtimeROS2"
ROS(机器人操作系统)是机器人系统开发中的一个关键框架,它提供了一种标准化的方式来处理硬件抽象、传感器接口、消息传递和其他基础设施。ROS2是ROS的最新版本,它在原有的基础上引入了许多改进,包括对实时性的支持。本文档将探讨ROS2中的实时控制特性,以及与ROS1和ros_control的对比。
实时计算在机器人领域至关重要,特别是在需要精确控制的场合,如工业自动化、无人机飞行和精密运动控制等。实时系统需要在预定的时间间隔内完成任务,确保操作的确定性和可预测性。这通常意味着系统必须满足硬实时和软实时的要求,前者要求严格的时间约束,而后者则允许一定的容错时间。
ROS2设计时考虑了实时性需求,采用更轻量级的通信机制如DDS(Data Distribution Service)来降低延迟并提高性能。DDS提供了Quality of Service (QoS)策略,允许开发者为不同的数据流定制实时属性,例如,通过设置"Deadline" QoS策略确保数据在特定时间内送达。此外,ROS2还支持静态和动态配置,使得系统能够在运行时调整拓扑,这对于实时系统来说是非常重要的,因为它们可能需要根据环境变化快速适应。
与ROS1相比,ROS2在实时性方面有显著提升。ROS1使用基于TCP的ROS节点间通信,这可能导致较高的延迟和不可预测的行为,尤其是在处理大量数据时。ROS2则转向了UDP-like的协议,这在保持可靠性的前提下减少了延迟。另外,ROS1的ros_control模块虽然提供了对硬件控制的接口,但它本身并不具备内置的实时性保证。而在ROS2中,可以通过与DDS的集成更好地满足实时要求。
演示和结果显示,ROS2在实时控制方面的表现令人满意。通过合理配置和优化,可以实现满足实时性需求的复杂机器人控制系统。然而,要充分利用这些特性,开发者需要了解实时系统的最佳实践,包括选择适当的硬件平台、优化代码以减少上下文切换、以及调整操作系统和DDS设置以达到预期的实时性能。
RealtimeROS2为需要实时特性的机器人应用提供了强大的支持。通过理解实时计算的基本原则和ROS2的设计决策,开发者能够构建出更加高效、响应更快的机器人系统,从而提高整个系统的稳定性和可靠性。
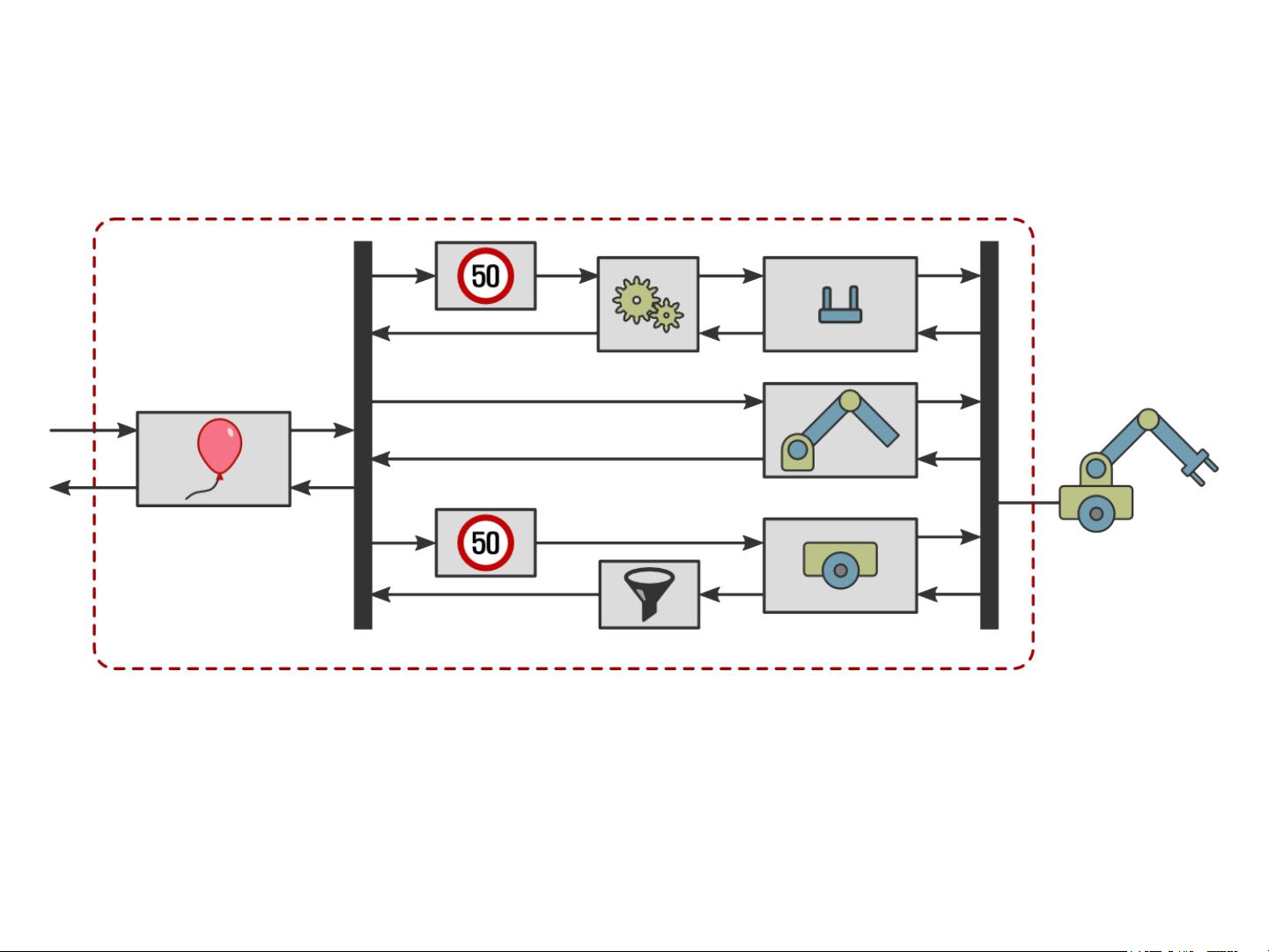
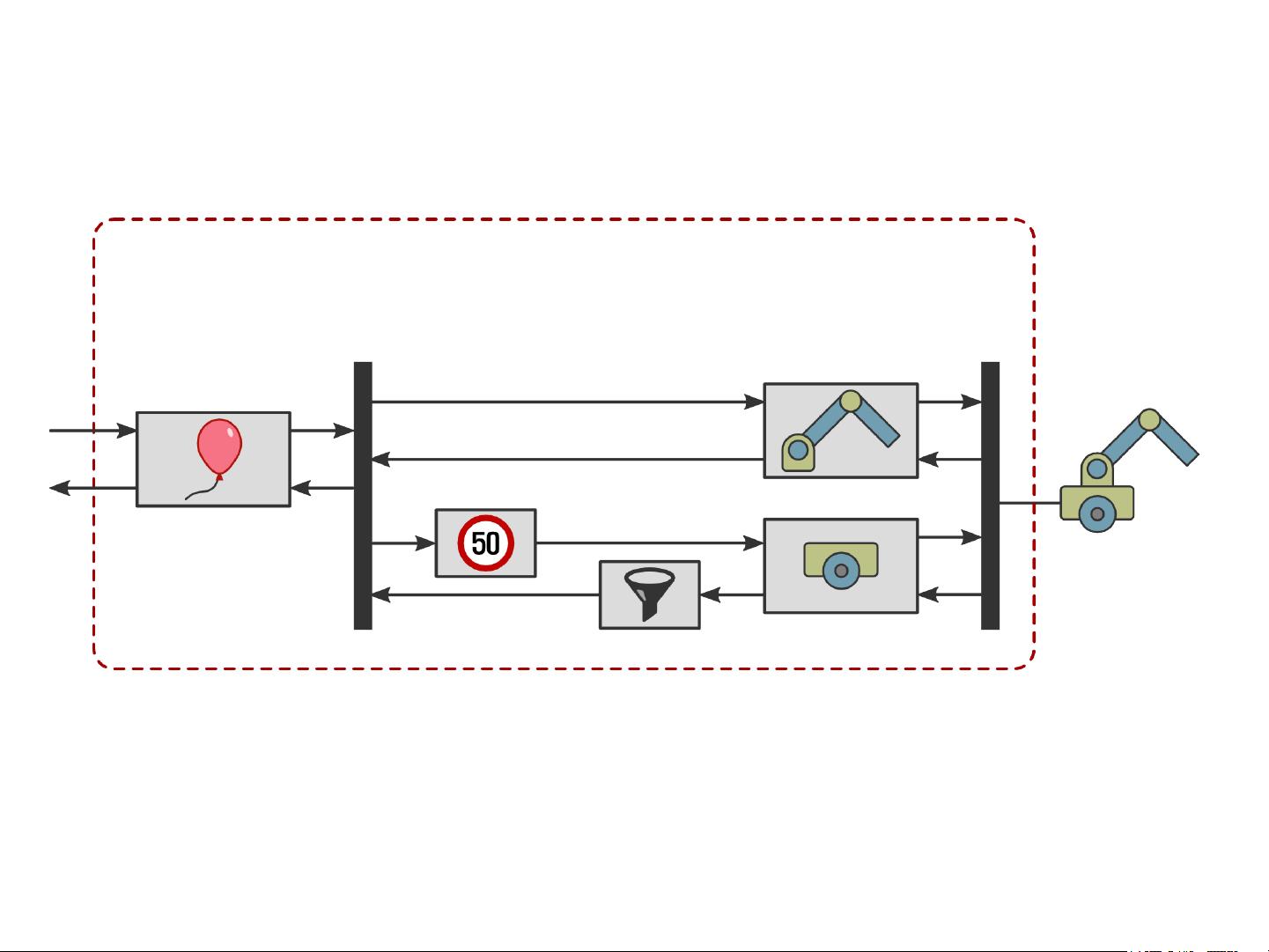
A motivating example
– Blocks can be composed by other blocks
– Some blocks are subject to real-time constraints
– System topology can change at runtime
9

剩余52页未读,继续阅读
831 浏览量
268 浏览量
2024-10-04 上传
2024-10-03 上传
2024-11-26 上传
1178 浏览量


zhangrelay
- 粉丝: 4w+
- 资源: 141
 我的内容管理
展开
我的内容管理
展开







