多任务自适应稀疏表示在局部Gabor特征人脸识别中的应用
178 浏览量
更新于2024-08-14
收藏 3.06MB PDF 举报
"这篇研究论文探讨了一种基于多任务自适应稀疏表示利用局部Gabor特征进行人脸识别的方法。在人类面部识别中,Gabor变换能够提取出多尺度和方向的特征,这对于识别非常有帮助。该论文提出了一种称为多任务自适应稀疏表示(MASR)的算法,旨在有效地利用不同任务间的互补和相关信息。
在MASR模型中,每个Gabor特征的稀疏编码被视为一个单独的任务。这个算法不仅限制了测试样本的Gabor特征由同一类别的训练原子联合表示,而且还促进了这些特征在每个类别内选择的原子的多样性,从而允许更好的表示。此外,为了利用局部信息,MASR算法在Gabor特征的局部区域上操作。
通过这种方式,论文中的方法能够捕获面部图像的局部细节,并利用这些细节提高识别的准确性。在处理面部识别时,局部Gabor特征可以捕捉到如眼睛、鼻子和嘴巴等关键面部结构的特征,而多任务自适应稀疏表示则能够处理这些特征之间的复杂关系,即使在光照变化、表情变化或部分遮挡的情况下也能有效识别。
在实际应用中,这种方法可能会对生物识别系统、安全监控和社交媒体的身份验证等领域产生重大影响。通过将Gabor变换与多任务学习的理论相结合,研究人员能够设计出更强大、更适应各种环境变化的人脸识别系统。实验结果通常会通过与其他常见人脸识别方法的比较来展示MASR的有效性,这通常包括准确率、误识率和拒绝率等指标。
这篇论文在人脸识别技术领域做出了重要贡献,它提出了一种创新的、利用多任务自适应稀疏表示的Gabor特征方法,有望提升面部识别系统的性能和鲁棒性。"
FANG AND LI: FACE RECOGNITION BY EXPLOITING LOCAL GABOR FEATURES WITH MASR 2607
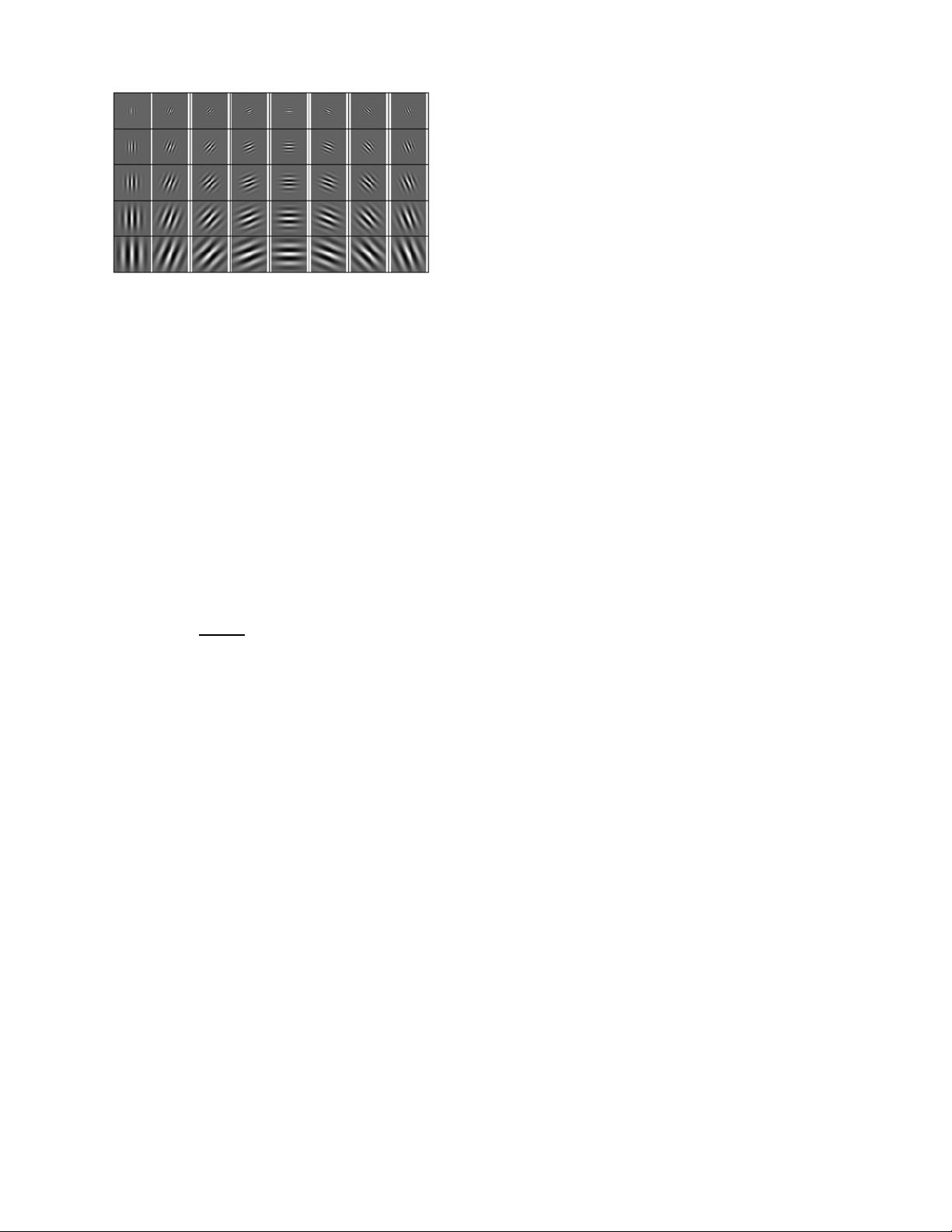
Fig. 1. Gabor wavelet with five scales and eight orientations.
sample y based on the minimum representation error
criteria
ˆc = SRC(y) = arg min
c
y −ˆy
c
2
= arg min
c
y − A
c
(ˆx)
2
(7)
where
c
(
ˆ
X) is an vector operator that preserves
coefficients of ˆx corresponding to class c and sets all
other coefficients to zero.
B. Gabor Wavelet
Gabor wavelet filters are defined as follows [10]:
ψ
o,s
(z) =
k
o,s
2
σ
2
· exp
−k
o,s
2
z
2
/2σ
2
·[exp(ik
o,s
z) − exp(−σ
2
/2)] (8)
where o and s separately represent the orientation and scale
of the Gabor filters, z = (x, y) denotes the pixel, and σ is the
ratio of the Gaussian window width to wavelength. The wave
vector k
o,s
is defined as
k
o,s
= k
s
· exp(iφ
o
) (9)
where k
s
= k
max
/ f
s
and φ
o
= (π · o)/8. k
max
is the maximum
frequency and f
s
is the spacing factor between kernels in the
frequency domain.
Gabor wavelet can have a number of different types by
altering the scale S and orientation O.Fig.1showsthe
Gabor wavelets with five scales and eight orientations. As can
be observed, the Gabor wavelet reflects various kinds of edge
and bar details with different orientations and takes abundant
frequency information with different scales. Therefore, the
Gabor wavelet can extract more details in some meaningful
local regions of face (e.g., nose, eyes, and mouth), which are
very useful for recognition. The convolution of an input face
image with the Gabor wavelet creates O× S magnitude images
and O × S phase images. Since the magnitude information
contains the variation of local energy, this paper only selects
magnitude images as the Gabor features. In addition, to more
effectively utilize the Gabor local information [8], [13], [14],
we will partition the feature image into a set of local
regions.
III. P
ROPOSED METHOD FOR LOCAL
GABOR-FEATURE-BASED FACE RECOGNITION
A. Multitask Sparse Representation Model for Gabor Features
Suppose we have a training dictionary A and a test
sample y, as described aforementioned, the Gabor wavelet can
generate O × S feature dictionaries {A
1
,...,A
O×S
} and test
samples {y
1
,...,y
O×S
} of different orientations and scales.
We arrange all test samples and atoms of training dictionaries
into column vectors and denote their sparse coefficients as a
matrix M =[x
1
,...,x
O×S
]∈R
N×(O×S)
,whereN stands for
the dimension of each sparse coefficient (corresponding to the
number of atoms in the dictionary A). The sparse matrix can
also be represented as row vectors M =[x
1
; ...; x
j
; ...; x
P
],
where x
j
is one row of the matrix M. Note that, for simplicity,
we here only utilize the whole image as the feature. In the later
section, we will discuss how to partition the image into regions
and utilize the SRW strategy to fuse the result of each region.
After Gabor multiscale-orientation dictionaries
{A
1
,...,A
O×S
} and test samples {y
1
,...,y
O×S
} are
obtained, we aim to utilize the information from different
scales and orientations to make a single decision for the
recognition. Based on the SRC model, one simple way
is to rewrite (3) into a multitask sparse representation
problem (Fig. 2)
{ˆx
i
}
O×S
i=1
= arg min
{x
i
}
o×s
i=1
y
i
−A
i
x
i
2
s.t. x
i
0
≤ K ∀1 ≤ i ≤ (O × S). (10)
However, this formulation separately pursuits the sparse
coefficient ˆx
i
for each task and thus does not consider the
relationship among the different tasks (orientations and scales).
To combine the information among the Gabor orientations
and scales, we can use a joint sparse assumption [34], [35]
that the sparse coefficients of different tasks have the same
sparse pattern. That is, for different tasks, the positions of the
nonzero coefficients in all the sparse vectors x
1
,...,x
O×S
are identical, while coefficient values might be varied. Under
this assumption, the nonzero coefficients in M should be on
the same rows and a joint sparse regularization
row,0
can be
placed on the M to select a small number of the representative
nonzero rows
M
row,0
=[x
1
2
; ...;x
j
2
; ...;x
P
2
]
0
(11)
where x
j
is one row in the sparse coefficient matrix M.
Then (10) can be rewritten as
ˆ
M = arg min
{M}
O×S
i=1
y
i
−A
i
x
i
2
s.t. M
row,0
≤ K. (12)
In [34] and [35], the application of the joint sparse prior for
multitask problem is termed as the MJSR model.
B. Multitask Adaptive Sparse Representation
The MJSR model explained above can be directly used to
exploit the Gabor information of different scales and orien-
tations by enforcing the same sparsity pattern among them.
剩余10页未读,继续阅读
2020-05-11 上传
2021-09-23 上传
2021-09-23 上传
2019-09-12 上传
2021-09-23 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38522029
- 粉丝: 4
- 资源: 880
 我的内容管理
展开
我的内容管理
展开







最新资源
- Material Design 示例:展示Android材料设计的应用
- 农产品供销服务系统设计与实现
- Java实现两个数字相加的基本代码示例
- Delphi代码生成器:模板引擎与数据库实体类
- 三菱PLC控制四台电机启动程序解析
- SSM+Vue智能停车场管理系统的实现与源码分析
- Java帮助系统代码实现与解析
- 开发台:自由职业者专用的MEAN堆栈客户端管理工具
- SSM+Vue房屋租赁系统开发实战(含源码与教程)
- Java实现最大公约数与最小公倍数算法
- 构建模块化AngularJS应用的四边形工具
- SSM+Vue抗疫医疗销售平台源码教程
- 掌握Spring Expression Language及其应用
- 20页可爱卡通手绘儿童旅游相册PPT模板
- JavaWebWidget框架:简化Web应用开发
- 深入探讨Spring Boot框架与其他组件的集成应用
