移动机器人障碍物检测:基于直线段匹配的新方法
85 浏览量
更新于2024-08-31
1
收藏 168KB PDF 举报
"基于直线段匹配的移动机器人的障碍物检测方法通过免去学习过程,利用人造物体常常呈现的棱柱、圆柱等形状特征,通过检测和匹配图像中的直线段来实现障碍物的识别与定位。这种方法针对单幅图像进行处理,避免了大运算量的光流法和需要专用硬件的立体视觉法。算法主要包括三个步骤:边缘点梯度值和方向计算、直线段提取、直线段匹配和障碍物轮廓重构。"
在移动机器人领域,障碍物检测是一项关键的技术,确保机器人能够安全地在环境中导航。本文提出的基于直线段匹配的检测方法,是对现有视觉检测技术的一种创新。传统的障碍物检测方法有三种:从单幅图像中提取已知障碍物、利用运动信息(如光流)和立体视觉方式。每种方法都有其优缺点,例如,从单幅图像中提取障碍物需要预先学习,光流法运算复杂,而立体视觉法则需要大量计算资源。
本文提出的方法属于第一类,即从单幅图像中提取障碍物,但不同之处在于它利用了物体边缘通常由对称直线段组成的特性,无需预先学习。首先,通过对图像进行Sobel算子边缘检测,获取边缘点的梯度值和方向,构建梯度图像。接着,根据像素点的梯度方向和值的相似性,提取出可能代表物体边缘的直线段。然后,利用直线段的属性(如长度、方向、位置),结合像素点的灰度直方图进行匹配,找出相对应的物体左右边缘。最后,通过匹配函数计算匹配值,重构障碍物轮廓并确定其精确位置。
这种方法的优点在于减少了计算复杂度,适用于实时环境中的移动机器人,尤其适合资源有限的嵌入式系统。然而,这种方法的有效性可能受到图像质量、光照条件和物体形状复杂性的限制。在实际应用中,可能需要结合其他传感器数据或进一步优化匹配策略,以提高在复杂环境下的检测精度和鲁棒性。
基于直线段匹配的障碍物检测技术为移动机器人提供了一种实用的解决方案,尤其是在简化算法和减少计算需求方面。随着计算机视觉技术的不断发展,这种创新的方法有望在未来的机器人导航系统中发挥更大的作用。
基于直线段匹配的移动机器人的障碍物检测基于直线段匹配的移动机器人的障碍物检测
目前,基于机器视觉的障碍物检测方法大体上分为三类[1]。第一类方法是从单幅图像中提取已知的障碍物[2]。
这种方法的缺点是需要已知障碍物的2D图像模式,或者需要一个学习阶段。第二类方法是利用运动信息提取障
碍物,其中最流行的方法是基于光流的障碍物检测[3]。该类方法的缺点是运算量大,而且基于所求出的光流场
分割障碍物仍然很困难。第三类方法是利用立体视觉方式提取障碍物,该类方法运算量大,通常需要专用的硬
件[4]。本文提出的方法属于第一类方法,但是省去了学习过程。此方法利用人们如下的先验知识:因为大多数
人造物体呈现为棱柱状、棱台形状或者圆柱、圆台形状,这些形状左右边缘表现为两条直线段(如电线杆、灯
柱、箱
目前,基于机器视觉的障碍物检测方法大体上分为三类[1]。第一类方法是从单幅图像中提取已知
的障碍物[2]。这种方法的缺点是需要已知障碍物的2D图像模式,或者需要一个学习阶段。第二
类方法是利用运动信息提取障碍物,其中最流行的方法是基于光流的障碍物检测[3]。该类方法的
缺点是运算量大,而且基于所求出的光流场分割障碍物仍然很困难。第三类方法是利用立体视觉
方式提取障碍物,该类方法运算量大,通常需要专用的硬件[4]。本文提出的方法属于第一类方
法,但是省去了学习过程。此方法利用人们如下的先验知识:因为大多数人造物体呈现为棱柱
状、棱台形状或者圆柱、圆台形状,这些形状左右边缘表现为两条直线段(如电线杆、灯柱、箱
子、椅子、桌子等),而且这两条直线段中的像素点的梯度方向应该是对称的,所以检测出这些
近似直线段的边缘就可以重构物体轮廓,从而定位目标。
本文提出的算法主要由三步组成:首先计算原图像中边缘点的梯度值和梯度方向,并且按照"同
一条直线段中像素点的梯度方向、梯度值相近似"的原则从边缘点图像中提取出直线段;然后利
用提取出来的直线段的各种属性(长度、梯度方向、位置)、两条直线段之间像素点的灰度直方图
以及背景灰度直方图对直线段进行匹配,搜索出分别对应于各个物体左右边缘的两两相对的直线
段;最后按照匹配函数计算出匹配值重构"障碍物"轮廓,并确定其位置。
1 边缘点的提取边缘点的提取
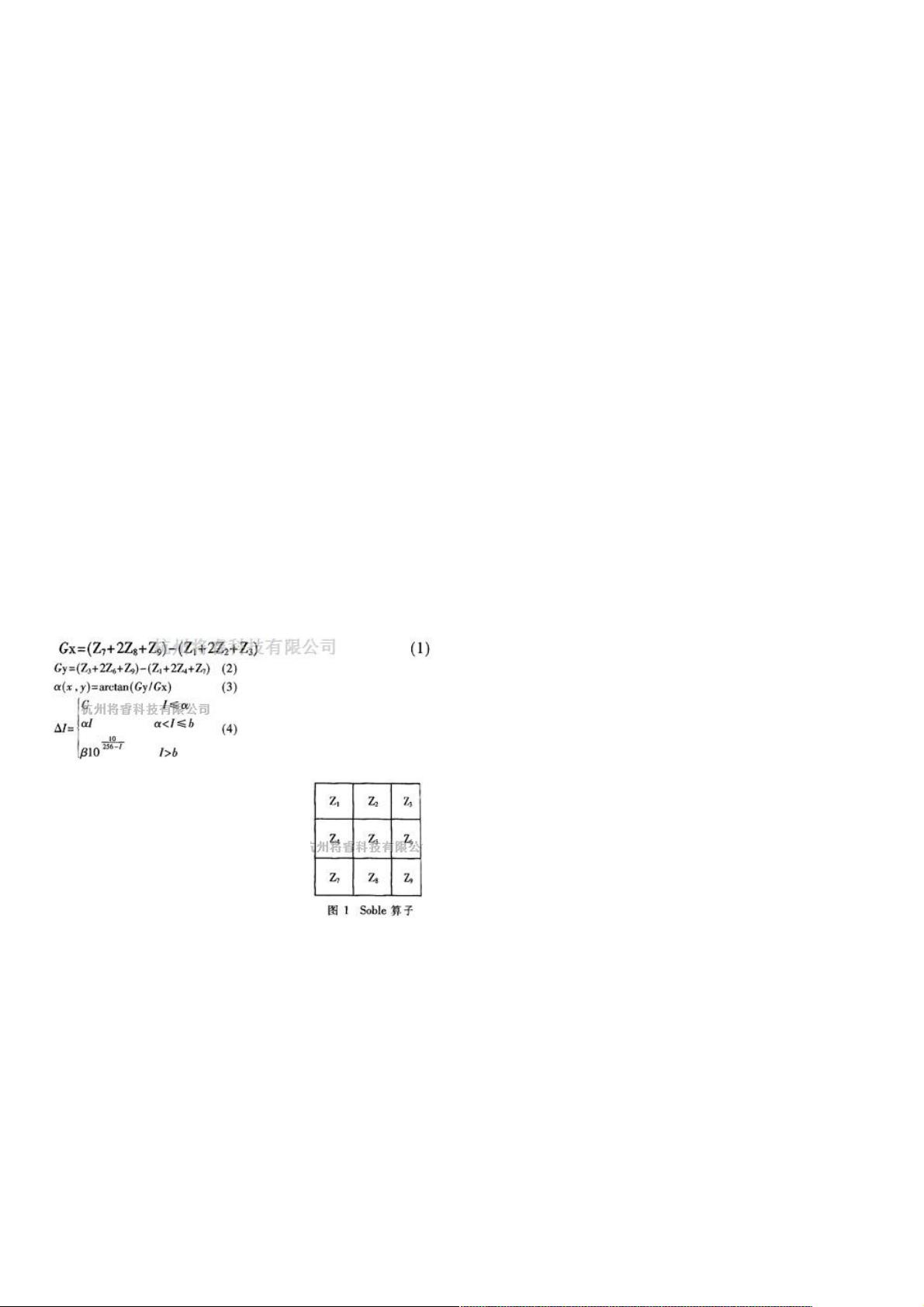
本文使用Soble算子(如图1)计算边缘点梯度值,并利用公式(1)~(3)计算出梯度向量的方向角,
从而构造梯度图像[5]。本文采用一种基于视觉模型的边缘检测阈值选择策略[6]进行梯度图像的
自适应阈值的设定,即利用公式(4)进行阈值设定。
式中,Gx是Soble算子的水平模板;Gy是Soble算子的垂直模板;α(x,y)是梯度向量的方向角;I
为背亮度灰度值,也就是象素点的灰度值,I小于a的区域为低暗区,I大于b的区域为高亮区,I在
a和b之间为中间区;△I为所定阈值,灰度级为256级;α、β和C为待定参数。
对梯度图进行"空穴捡出",删除由相互连通的边缘点组成的小块区域。因为小块区域大多由噪声
产生,就算是真正的边缘点,它们对算法也不起作用,所以可删除它们以降低算法复杂度。
2 直线段的提取直线段的提取
通过综合相位编组法与边界跟踪法的优点,本文提出一种新的直线段的提取方法。这种方法能检
测到阶跃形和屋顶形的直线边缘,同时也适用于单像素和多像素宽度的直线边缘的检测。
首先,对边缘点的梯度向量的方向角进行方向离散化,即将其分为0度、45度、135度、180度、
270度和315度六个方向类型(如图2)。边缘点的梯度向量的方向角与哪个方向类型的差最小,就
把边缘点归为哪个类型。同属于一个方向类型的边缘点互为"同类型边缘点",同属于一个类型的
直线段互为"同类型直线段"。
下载后可阅读完整内容,剩余3页未读,立即下载
2018-05-10 上传
2023-07-12 上传
2023-06-06 上传
2023-06-06 上传
2023-02-17 上传
2023-06-07 上传
2023-05-27 上传
2023-05-22 上传
2023-12-19 上传

weixin_38622475
- 粉丝: 0
- 资源: 913
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
