LQG主动悬架控制系统:随机线性最优控制解析
下载需积分: 44 | DOC格式 | 183KB |
更新于2024-09-08
| 30 浏览量 | 举报
本文档主要探讨了LQG(Linear Quadratic Gaussian)主动悬架控制在随机线性最优控制中的应用。作者通过MATLAB和Simulink工具进行建模和仿真,来研究如何利用LQG理论优化车辆的悬架系统,以提高行驶舒适性和稳定性。
在LQG主动悬架控制中,主要涉及到以下几个关键知识点:
1. **状态空间模型**:车辆悬架系统的动态行为可以用一组状态变量表示,如车身加速度、轮胎动位移、悬架行程等。这些状态变量构成了状态空间方程,用矩阵A和B描述,其中A描述系统无输入时的状态变化,B描述输入对状态的影响。
2. **系统输入**:LQG控制器需要考虑的输入包括路面不平度、车速等,这些因素会影响车辆的动态响应。例如,路面不平度系数G0和车速uc用于模拟实际驾驶环境。
3. **LQG控制器设计**:LQG控制是结合了最优控制(LQ,Linear Quadratic)和高斯滤波(G)的方法,通过设计权重矩阵Q、R和N来最小化性能指标的均方根值。Q矩阵对应于状态误差的权重,R矩阵对应于控制输入的权重,N矩阵通常用于处理系统噪声。
4. **MATLAB和Simulink仿真**:MATLAB是一种强大的数值计算和编程环境,Simulink则提供了图形化建模工具,用于模拟复杂系统。在这里,作者使用LSIM函数进行仿真,该函数可以计算线性系统在离散时间或连续时间下的响应,输入为状态空间模型和控制信号。
5. **性能指标**:在LQG控制中,性能指标通常包括车身加速度、轮胎动位移和悬架行程的均方根值。权重系数如q1、q2、q3和q4分别对应于不同状态的重视程度,影响控制器的决策。
6. **悬架参数**:车辆模型参数如车身质量、转动惯量、悬架刚度、阻尼系数等,对于模拟真实车辆动态至关重要。通过调整这些参数,可以研究不同悬架配置对控制效果的影响。
7. **滤波器设计**:由于实际系统中存在不确定性,LQG控制需要考虑噪声。高斯滤波器用于估计系统状态并处理随机噪声,确保控制器的稳健性。
通过以上分析,我们可以看出,LQG主动悬架控制系统利用了先进的控制理论和数值模拟技术,以提高汽车在不平路面上的行驶性能。这一领域的研究对于提升车辆乘坐舒适性、安全性和耐久性具有重要意义。
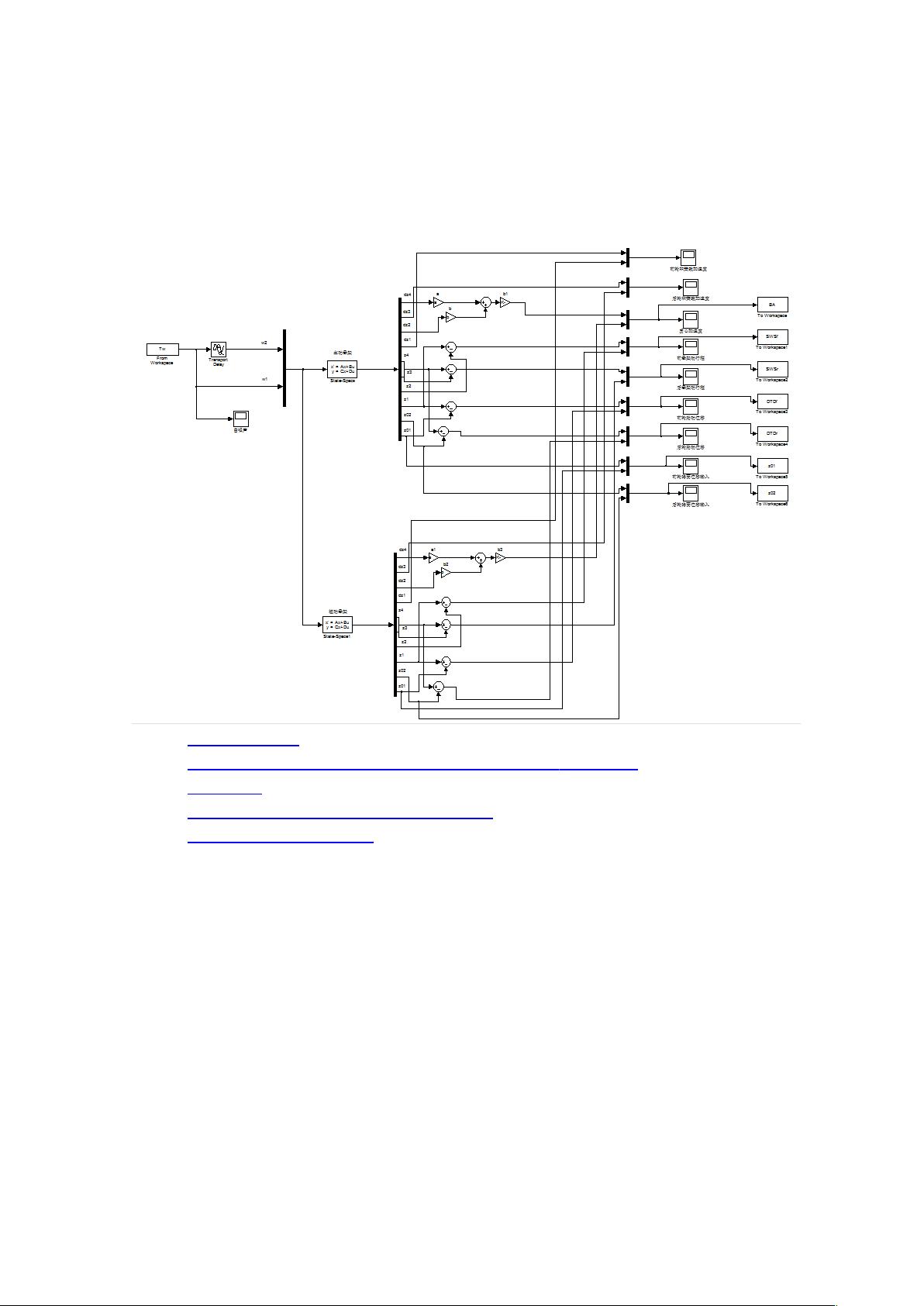
主动悬架随机线性最优控制(LQG)
一、 Simulink 建模及 M 文件编写
车辆模型参数
状态空间方程矩阵
A 、 B 、 F LQG
控制器矩阵
Q 、 R 、 N
系统输入
函数仿真 [Y,X]=LSIM(A,B,C,D,U,T)
性能指标均方根值比较
%%半车模型仿真输入参数值 %%
车辆模型参数
clc
clear
mhb=690; %车身质量(kg)
Ihp=1222; %车身俯仰转动惯量(kg.m^2)
mwf=40; %前轮非簧载质量(kg)
mwr=45; %后轮非簧载质量(kg)
Ksf=17000; %前悬架刚度(N/m)
Ksr=22000; %后悬架刚度(N/m)
Ktf=200000; %前轮胎刚度(N/m)
Ktr=200000; %后轮胎刚度(N/m)
a=1.3; %前轴到质心的距离(m)
b=1.5; %后轴到质心的距离(m)
下载后可阅读完整内容,剩余5页未读,立即下载
相关推荐




普通网友
- 粉丝: 484
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网页自动刷新工具 v1.1 - 自定义时间间隔与关机
- pt-1.4协程源码深度解析
- EP4CE6E22C8芯片三相正弦波发生器设计与实现
- 高效处理超大XML文件的查看工具介绍
- 64K极限挑战:国际程序设计大赛优秀3D作品展
- ENVI软件全面应用教程指南
- 学生档案管理系统设计与开发
- 网络伪书:社区驱动的在线音乐制图平台
- Lettuce 5.0.3中文API文档完整包下载指南
- 雅虎通Yahoo! Messenger v0.8.115即时聊天功能详解
- 将Android手机转变为IP监控摄像机
- PLSQL入门教程:变量声明与程序交互
- 掌握.NET三层架构:实例学习与源码解析
- WPF中Devexpress GridControl分组功能实例分析
- H3Viewer: VS2010专用高效帮助文档查看工具
- STM32CubeMX LED与按键初始化及外部中断处理教程
