Gslib库与地质统计学:应用指南
需积分: 50 67 浏览量
更新于2024-07-17
1
收藏 16.38MB PDF 举报
"GSLIB- Geostatistical Software Library and User Guide.pdf" 是一份由斯坦福大学的 Clayton V. Deutsch 和 Andre G. Journel 编写的关于地质统计学软件库的文档,旨在为用户提供地质统计分析的工具和指南。这本书是第二版,包含了 Andre G. Journel 的《Geostatistics for Natural Resources Evaluation》和 Edward H. Isaaks 及 R. Mohan Srivastava 的《An Introduction to Applied Geostatistics》等系列作品的一部分理念。
GSLIB (Geostatistical Software Library) 是一个用于地球科学、环境科学和工程领域的统计分析工具集,特别关注地质数据的建模和插值。这个库提供了一系列算法,包括但不限于:
1. 变差函数(Variogram):变差函数是地质统计学中的核心概念,它描述了空间数据在不同距离上的变化程度。GSLIB 提供了计算和拟合变差函数的方法,帮助用户理解数据的空间结构并建立合适的模型。
2. Kriging 插值:Kriging 是一种基于变差函数的高级插值方法,能够估计未观测点的值,并给出估计误差的不确定性。GSLIB 包含了普通 Kriging、简单 Kriging、泛函 Kriging 等多种 Kriging 方法。
3. 密度估计:GSLIB 提供了估计数据分布密度的工具,这对于理解数据的集中趋势和分布特征至关重要。
4. 数据处理:包括数据清理、转换、标准化等预处理步骤,确保数据分析的准确性和有效性。
5. 图形和可视化:GSLIB 还包含了绘制各种地质统计图的功能,如变差函数图、半方差图、Kriging 预测结果图等,帮助用户直观地理解和解释数据。
6. 分区统计:对于大规模数据集,GSLIB 提供分区统计方法,可以将数据划分为多个区域并分别进行统计分析,简化复杂问题。
7. 聚类和分类:GSLIB 支持对地质特征进行聚类分析,有助于发现数据的内在模式和分类。
通过 GSLIB,用户可以进行高级的地质统计分析,为资源评估、环境影响评估、矿产勘探等领域提供科学的决策支持。该软件库不仅适用于专业地质学家,也为其他领域的研究人员提供了强大的数据处理和分析工具。
22
CHAPTER
II. GETTING STARTED
xmn
East
(X
axis)
1
2
...
nx
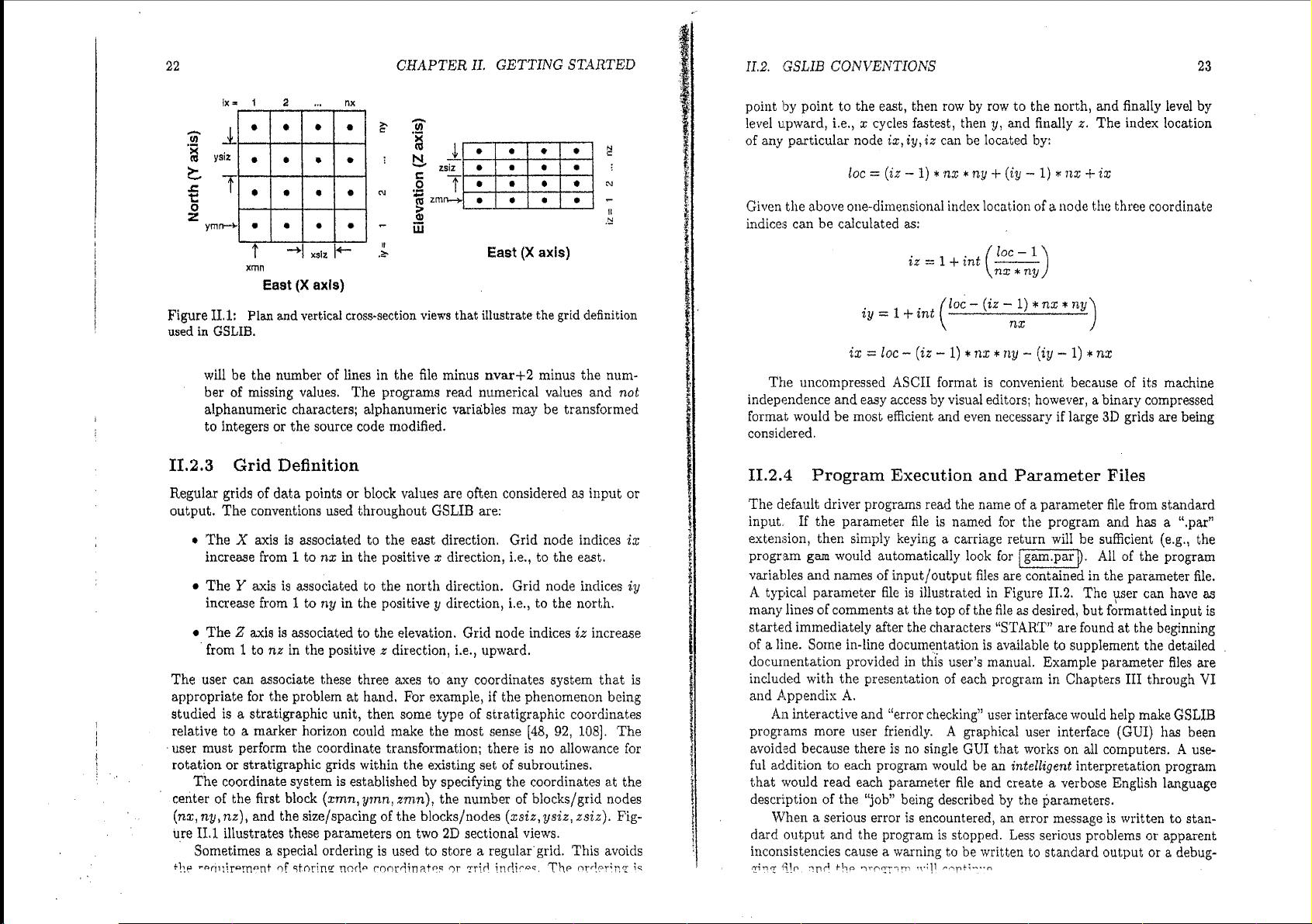
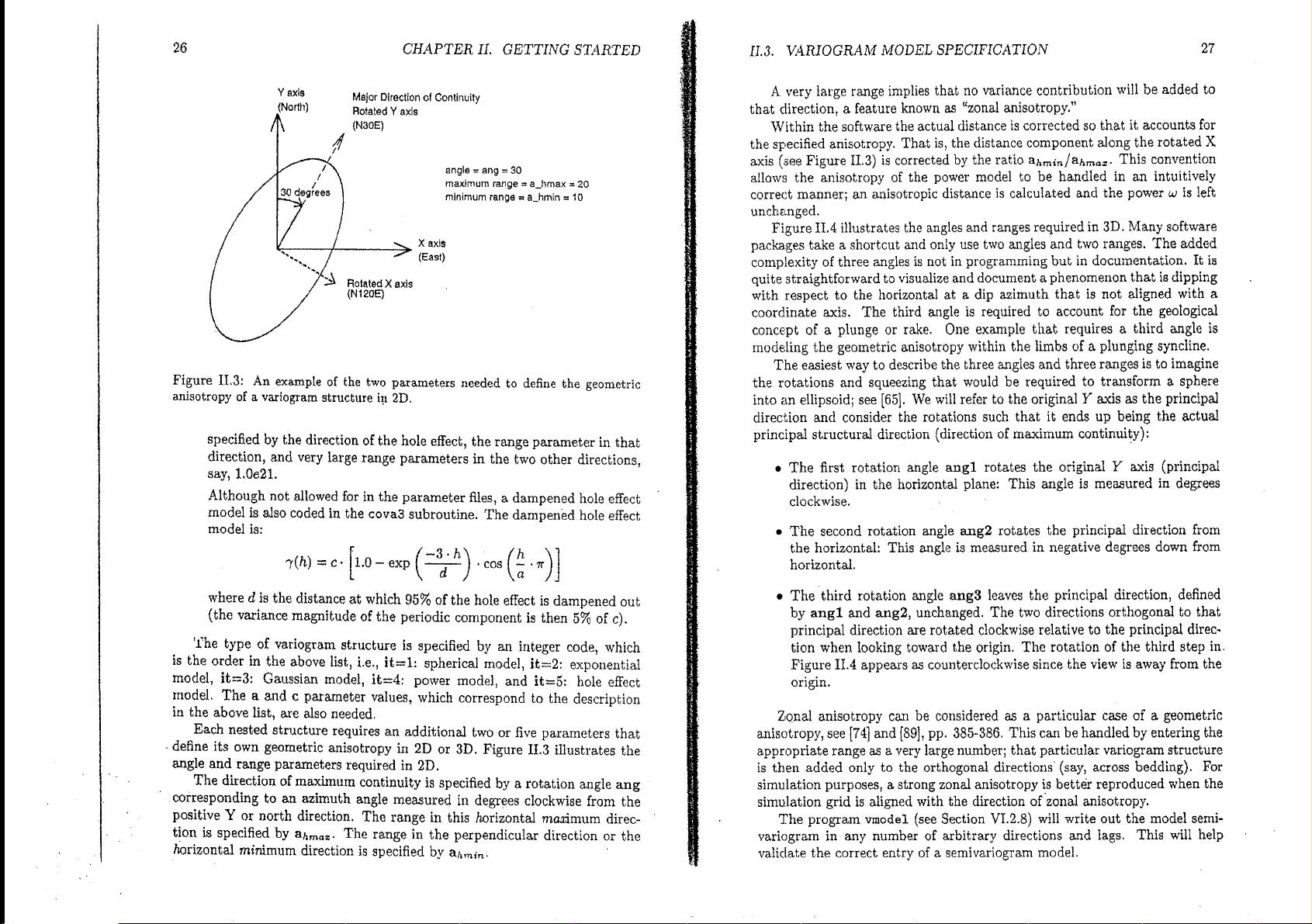
Figure 11.1:
Plan
and vertical cross-section views that illustrate the
grid definition
used
in
GSLIB.
will be the number of lines in the file minus
nvari-2
minus the num-
ber of missing values. The programs read numerical values and
not
alphanumeric characters; alphanumeric varidbkes may be transformed
:
**.*
to integers or the source code modified.
t
+I
xsiz
I+-
**..
b.0.
.*em
11.2.3
Grid Definition
Regular grids of data points or block values are often considered
as
input or
output. The conventions used throughout
GSLIB
are:
r
The
X
axis is associated to the east direction. Grid node indices
ix
increase from
1
to nx in the positive
x
direction, i.e., to the east.
The
Y
axis is associated to the north direction. Grid node indices iy
increase from
1
to ny in the positive y direction, i.e., to the north.
The
2
axis is associated to the elevation. Grid node indices iz increase
from
1
to nz in the positive
z
direction, i.e., upward.
The user can associate these three axes to any coordinates system that is
appropriate for the problem at hand. For example, if the phenomenon being
studied is
a
stratigraphic unit, then some type of stratigraphic coordinates
relative to
a
marker horizon could make the most sense
[48,
92, 1081. The
user must perform the coordinate transformation; there is no allowance for
rotation or stratigraphic grids within the existing set of subroutines.
The coordinate system is established by specifying the coordinates at the
center of the first block (xmn, ymn, zmn), the number of blockslgrid nodes
(nx, ny, nz), and the
size/spacing of the blocks/nodes (xsiz, ysiz, zsiz). Fig-
ure 11.1 illustrates these parameters on two 2D sectional views.
Sometimes
a
special ordering is used to store a ~egular grid. This avoids
+hr
rnr~~~i~mqont
qf
~tgring
qcdn
rnorr\inptps
nr
?rid
ipCl.ime
The
nrrlnr.mq
is
11.2.
GSLIB CONVENTIONS
23
point by point to the east, then row by row to the north, and finally level
by
level upward, i.e., x cycles fastest, then y, and finally
z.
The index location
of any particular node is, iy, iz can be located by:
loc
=
(iz
-
1)
*
nx *ny
+
(iy
-
1)
*
122
+
ix
Given the above one-dimensional index location of a node the three coordinate
indicels can be calculated
as:
oc-
1
iz
=
I
+
int
(L)
nx
*
np
lo;
-
(iz
-
1)
*
nx
*
ny
iy
=
1
+
int
nx
ix
=
loc
-
(iz
-
I)
*
nx
*
ny
-
(iy
-
1)
*
nx
The uncompressed ASCII format is convenient because of its machine
independence and easy access by visual editors; however, a binary compressed
format would be most efficient and even necessary if large
3D
grids are being
considered.
11.2.4
Program
Execution
and Parameter Files
The default driver programs read the name of
a
parameter file from standard
input
If the parameter file is named for the program and has a ".parn
extension, then simply keying a carriage return will be sufficient
(e.g., the
program
gam
would automatically look for
[mp.
All of the program
variables and names of input/output files are contained in the parameter file.
A
ty~~ical parameter file
is
illustrated in Figure 11.2. The pser can have
as
many lines of comments at the top of the file
as
desired, but formatted input is
started immediately after the characters "START" are found at the beginning
of a line. Some in-line documentation is available to supplement the detailed
documentation provided in this user's manual. Example parameter files are
included with the presentation of each program in Chapters
I11 through
VI
and Appendix
A.
An interactive and "error checking" user interface would help make GSLIB
programs more user friendly. A graphical user interface
(GUI)
has been
avoided because there is no single GUI that works on all computers. A use-
ful addition to each program would be an
intellzgent
interpretation program
that would read each parameter file and create a verbose English language
description
of the "job" being described by the parameters.
When a serious error is encountered, an error message is written to stan-
dard output and the program is stopped. Less serious problems or apparent
inconsistencies cause a warning to be written to standard output or a debug-
minq
(?I(>
qprl
tho
qrnrrrqir-
.\.rll
rnpt:-,,n


剩余188页未读,继续阅读
点击了解资源详情
167 浏览量
2021-09-14 上传
2023-03-10 上传
122 浏览量

CSRF-CN
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- papodev:伊斯坦多尔·斯坦加林Papo de Dev da Isadora Stangarlin
- r2anki:使用r2anki和空格分隔扩展词汇量
- Navicat 15 for PostgreSQL.7z
- opencpu-java-client:一个简单的 OpenCPU Java 客户端库
- 验证通2010示例 java版源代码
- 个人SNS名片组件响应式网页模板
- calculadora-javascipt:Projeto calculadora Hcode
- WittyParrot-crx插件
- Unity 场景切换管理插件
- cs3050-fun-group-project:cs3050 的最终小组项目
- 情绪分析数据集
- kfc123百度手写输入法源代码
- 健康管理app(包括代码以及详细文档)
- Notion Slide Shows-crx插件
- scCancer:用于自动处理癌症中单细胞RNA-seq数据的软件包
- 常见排序算法-C语言
