MATLAB实现经典隶属函数:高斯、双边高斯与一般钟型
需积分: 49 149 浏览量
更新于2024-07-23
14
收藏 215KB PDF 举报
本章节详细介绍了如何在MATLAB中使用隶属函数进行模糊逻辑建模。隶属函数是模糊系统的基础,它们将不确定性和模糊性转化为可处理的数据形式。这里主要讲解了三种常见的隶属函数类型:高斯隶属函数、两边型高斯隶属函数以及一般钟型隶属函数。
1. 高斯隶属函数 (gaussmf): 这是一种常用的模糊集表示方法,其数学表达式为 \( \frac{1}{\sigma\sqrt{2\pi}} e^{-\frac{(x-c)^2}{2\sigma^2}} \),其中 \( c \) 和 \( \sigma \) 是参数,分别代表中心位置和标准偏差。通过`gaussmf`函数实现,如例6-1所示,通过改变参数可以调整函数的形状和宽度,生成的图形直观展示了函数特性。
2. 两边型高斯隶属函数 (gauss2mf): 这种函数结合了两个独立的高斯函数,参数包括两个中心位置 \( c_1 \) 和 \( c_2 \),以及对应的宽度 \( \sigma_1 \) 和 \( \sigma_2 \)。例子6-2展示了如何通过改变这些参数来绘制不同形状的函数图形。
3. 一般钟型隶属函数 (gbellmf): 也称为bellmf函数,它不像高斯函数那样对称,具有更尖锐的峰值。这种函数的数学表达式依赖于三个参数 \( a \), \( b \), 和 \( c \),其中 \( b \) 控制峰值的陡峭程度,\( c \) 定义峰值位置。例6-3展示了如何使用`gbellmf`函数创建此类函数及其图形。
这些函数在MATLAB中提供了灵活的方法来构建模糊系统的输入输出映射,帮助设计者处理不确定性的决策问题。通过这些函数,用户能够可视化不同的隶属度变化,并根据实际应用场景调整函数的形式,从而实现模糊逻辑的精确控制和分析。理解并熟练运用这些工具对于模糊控制系统的设计和优化至关重要。
MATLAB6.0 数学手册
206
0 2 4 6 8 10
0
0.2
0.4
0.6
0.8
1
smf, P=[1 8]
图 6-10
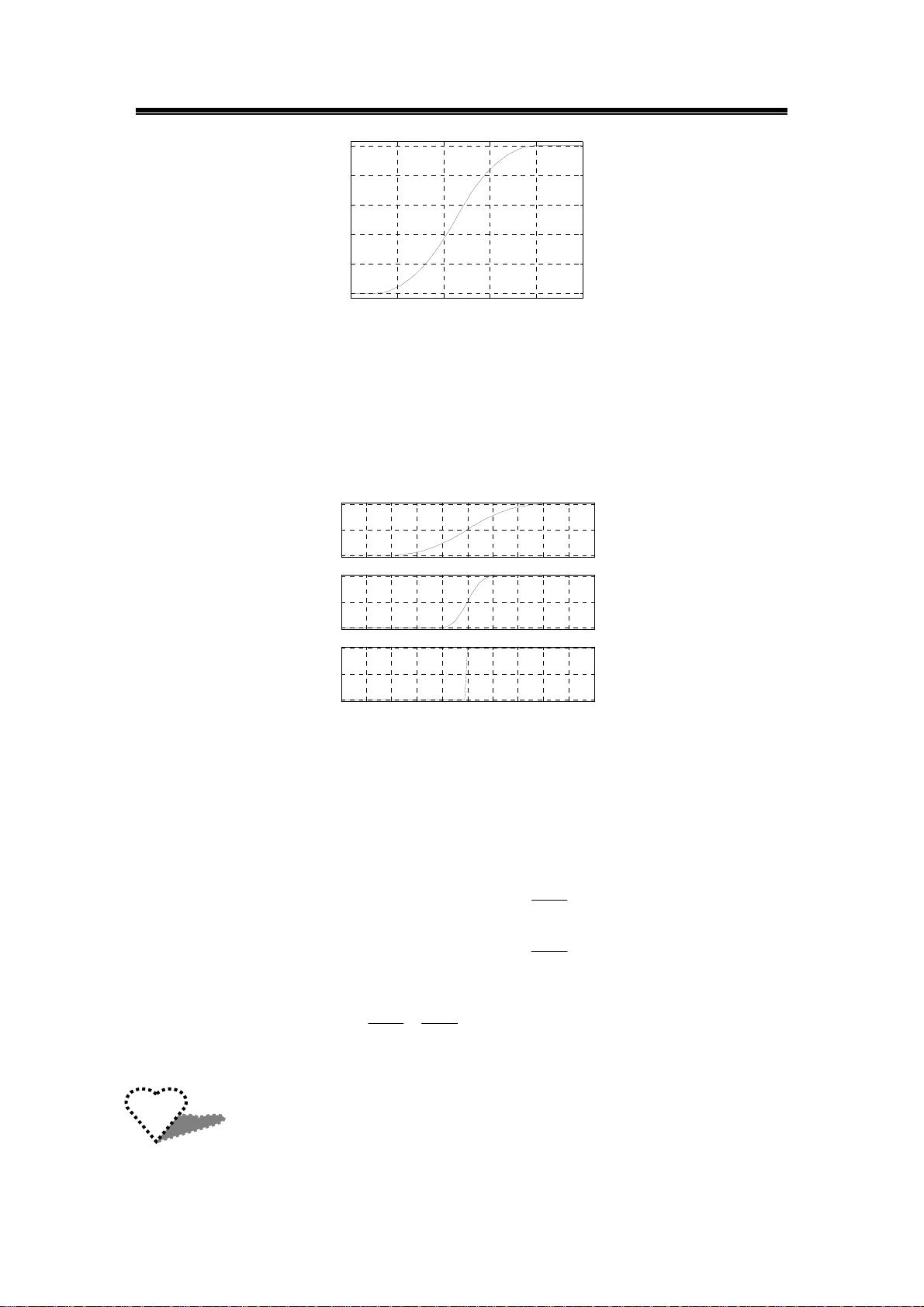
例 6-11
>>x = 0:0.1:10;
>>subplot(3,1,1);plot(x,smf(x,[2 8]));
>>subplot(3,1,2);plot(x,smf(x,[4 6]));
>>subplot(3,1,3);plot(x,smf(x,[6 4]));
结果为图 6-11。
0 1 2 3 4 5 6 7 8 9 10
0
0.5
1
0 1 2 3 4 5 6 7 8 9 10
0
0.5
1
0 1 2 3 4 5 6 7 8 9 10
0
0.5
1
图 6-11
6.1.10 建立梯形隶属函数
函数 trapmf
格式 y = trapmf(x,[a b c d])
说明 这里梯形隶属函数表达式:
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
≤
≤≤
−
−
≤≤
≤≤
−
−
≤
=
xd0
dxc,
cd
xd
cxb,1
bxa,
ab
ax
ax,0
)d,c,b,a;x(f
或 f(x;a,b,c,d) = max(min( )0),
cd
xd
,1,
a
b
ax
−
−
−
−
,定义域由向量 x 确定,曲线形状由参数
a,b,c,d 确定,参数 a 和 d 对应梯形下部的左右两个拐点,参数 b 和 c 对应梯形上部的左右两
剩余26页未读,继续阅读
3078 浏览量
213 浏览量
186 浏览量
3078 浏览量
357 浏览量
220 浏览量
282 浏览量
109 浏览量
2024-01-26 上传

duyunsongwei
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Matlab Robotics Toolbox 9.10:仿真验算新高度
- 打造个性化iOS转场动画效果实战指南
- AWS微服务部署实践:构建Chirper React应用后端
- Android Native Service开发实战教程
- JAVA语言实现网上购物用户注册系统的UML设计实训
- 微信支付接入流程与操作演示
- 最佳攀岩照片展示插件-Best rock climbing pictures-crx
- 前端实现的简易Python在线运行平台源码揭秘
- 仿微博头条设计的Android自定义PagerIndicator
- 基于JSP+JavaBean+Servlet的学生信息管理系统实现
- JavaScript实现圣诞愿望的奇妙之旅
- POSTMAN谷歌浏览器插件版的使用及开发者版本提示
- 实现360桌面悬浮窗效果的拖拽删除功能
- 掌握qt+cef实现多层网页点击访问
- Android RecyclerView添加头部示例教程
- Chrome扩展程序:Fifa World Cup 2018实时排名插件
