
7
A
0.5
X轴/(m)
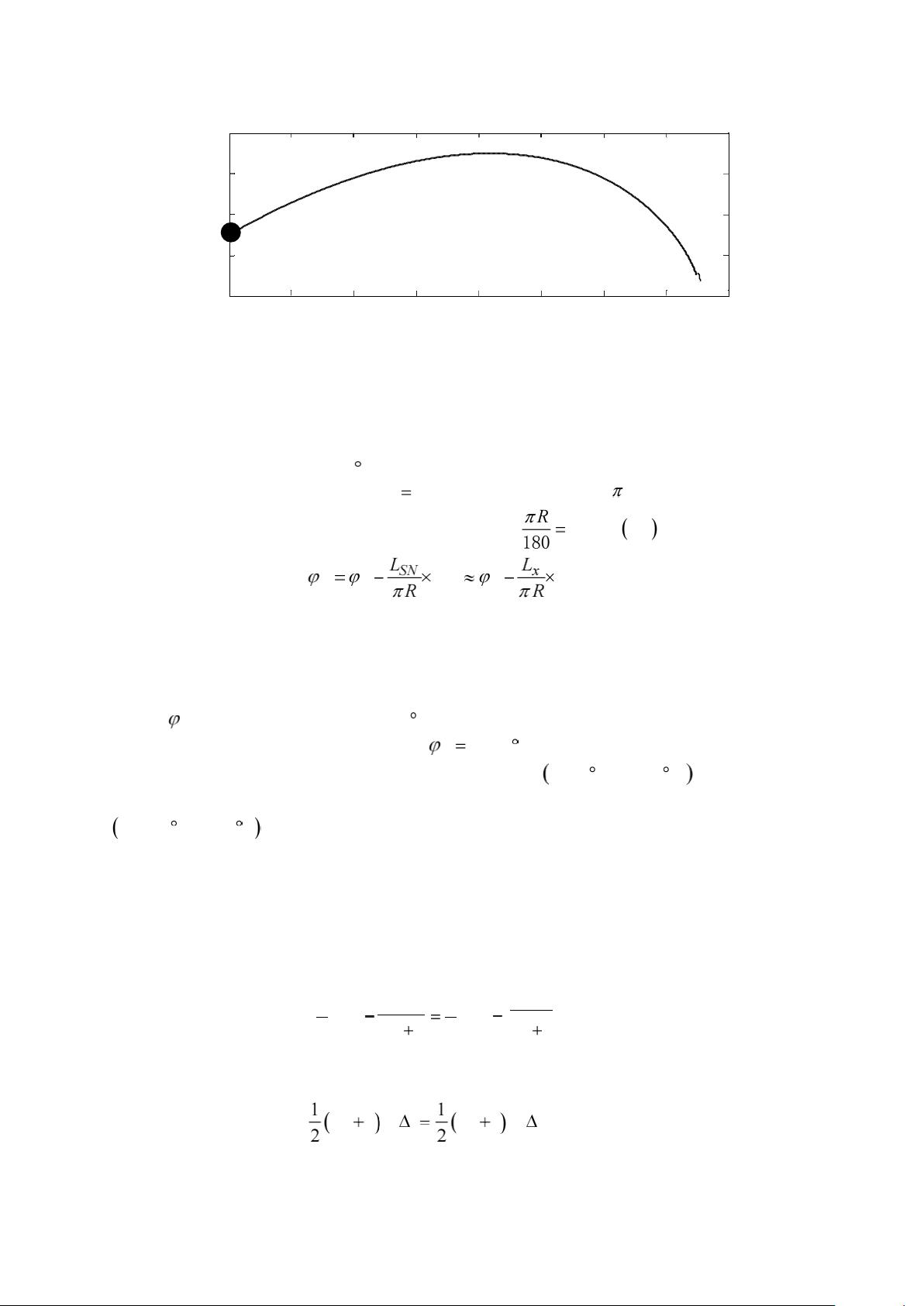
图 5-3:主减速段嫦娥三号运动轨迹图
结合图 5-3 能够较为直观的观察主减速段运动轨迹,图中 A 点即为所求近月点位置,
其水平方向上的位移为 377095.38m 。
3)近月点在月球的投影经纬度计算
①由于绕月轨道所在平面包含预着陆点,因此,近月点、远月点与主减速段末位置均处
于同一经线上,经度同为19.51 W ;
②由已知条件可知,月球平均半径R 1737.013 km ,圆周率为 。
同一经线上
,
纬度每变化一度对应的地表距离为: 30
.
317
km
;
由此可得,a 点的纬度:
a
b
180
b
180 。
其中:a 点—卫星在近月点处,沿着 Z 轴方向投影至月球表面的地点;
b 点—卫星预着陆点所在的月球表面上空 3000 米;
L
x
—在x 轴方向上的飞行距离,此处为 377095.38 米;
LSN
— A 地和B 地之间的在南北方向上的地表距离;
—纬度值,此处纬度为19.51 W ;
基于以上经纬度转化公式,最终得到:
a
31.68 N 。
综上所述,近月点在月球表面的投影点处位置为 19.51 W , 31.86 N ,高度 15000
米,根据近月点、远月点经纬度对称原则,远月点在月球表面的投影点处位置为
160.49 E, 31.68 S
,高度 100000 米。
5.1.2 近月点和远月点的速度求解
[1]
1)速度大小
设月球平均半径为r ,万有引力引力常量为G ,月球质量为M
,嫦娥三号在近月点
距离月球表面的距离为R
A
,嫦娥三号在远月点距离月球表面的距离R
B
。
①由于嫦娥三号在运动过程中只受万有引力作用,所以遵循机械能守恒定律。
从远日点运动到近日点的过程中,根据机械能守恒定律得:
1
2
2
A
GMm
R r
GMm
R r
(10)
②根据开普勒第二定律及引出的推论可知,其不仅适用绕太阳运转的所有行星,还适用
于卫星沿椭圆轨道运行的情况。为此,由开普勒第二定律可得:
R
A
r
v
A
t
R
B
r
v
B
t
(11)
将(2)式与(1)式联立可得:
1
2
mv
x 10
4
4
Y轴/(m)
2
B
x
10
5
mv
3.5
2.5
1.5
4
2
2
3
3
0
0
A
B
1
1
剩余36页未读,继续阅读

AI拉呱
- 粉丝: 2825
- 资源: 5448

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


