CAN-bus通信协议详解:V2.0版标准与扩展格式
需积分: 9 82 浏览量
更新于2024-07-30
收藏 374KB PDF 举报
"CAN通信协议,也称为CAN-bus,是一种广泛应用在汽车、工业自动化和其他领域的串行通信协议。CAN-bus规范V2.0版本引入了两种报文格式,即标准格式(11位标识符)和扩展格式(29位标识符),以满足不同通讯需求。标准格式适合那些不需要广泛地址空间的应用,而扩展格式则提供了更大的灵活性。CAN2.0规范分为A部分和B部分,A部分定义了CAN1.2规范中的报文格式,B部分详细阐述了标准和扩展格式。CAN仪器应兼容A部分或B部分,以便在不同类型的设备之间实现通讯。该文档涵盖了报文传输、帧类型、错误处理、位定时等多个关键方面,旨在确保CAN网络的可靠性和兼容性。"
CAN通信协议是控制器局域网络的标准,主要设计目的是在电子系统间实现高效、可靠的通信。V2.0版本的出现是为了应对日益增长的通信需求,特别是对于识别位标准化的需求。它定义了两种不同的报文格式,以适应不同的系统规模和复杂度。
标准格式的报文使用11位标识符,适用于那些不需要大量地址空间的应用场景。而扩展格式则扩展了标识符至29位,极大地增加了可分配的地址数量,这在需要大量节点或者更复杂网络结构的系统中非常有用。
CAN报文传输包括数据帧、远程帧、错误帧和过载帧等多种类型。数据帧用于传输实际的数据,远程帧用于请求其他节点发送数据,错误帧和过载帧则是用于错误检测和网络管理。发送器和接收器的定义以及报文校验机制保证了数据的准确传输。
错误处理是CAN协议的重要组成部分,包括错误检测和错误标定,以确保网络的稳定性。一旦检测到错误,节点会通过特定的错误标志进行反馈,并可能进入故障界定状态,以防止错误数据的传播。
位定时要求和CAN振荡器容差的规定确保了在不同速率和环境条件下的通信同步,这对于一个分布式系统来说至关重要。CAN2.0规范的修订还考虑到了协议的兼容性,使得旧版本的设备也能与新版本的设备协同工作。
CAN通信协议通过其严谨的报文格式、错误处理机制和兼容性设计,为多种应用场景提供了高效且可靠的通信解决方案。无论是小型系统还是大型网络,CAN-bus规范V2.0都能提供足够的灵活性和稳定性。
广州周立功单片机发展有限公司 Tel: 020-38730976 38730977 Fax:38730925 http://www.zlgmcu.com
- 7 -
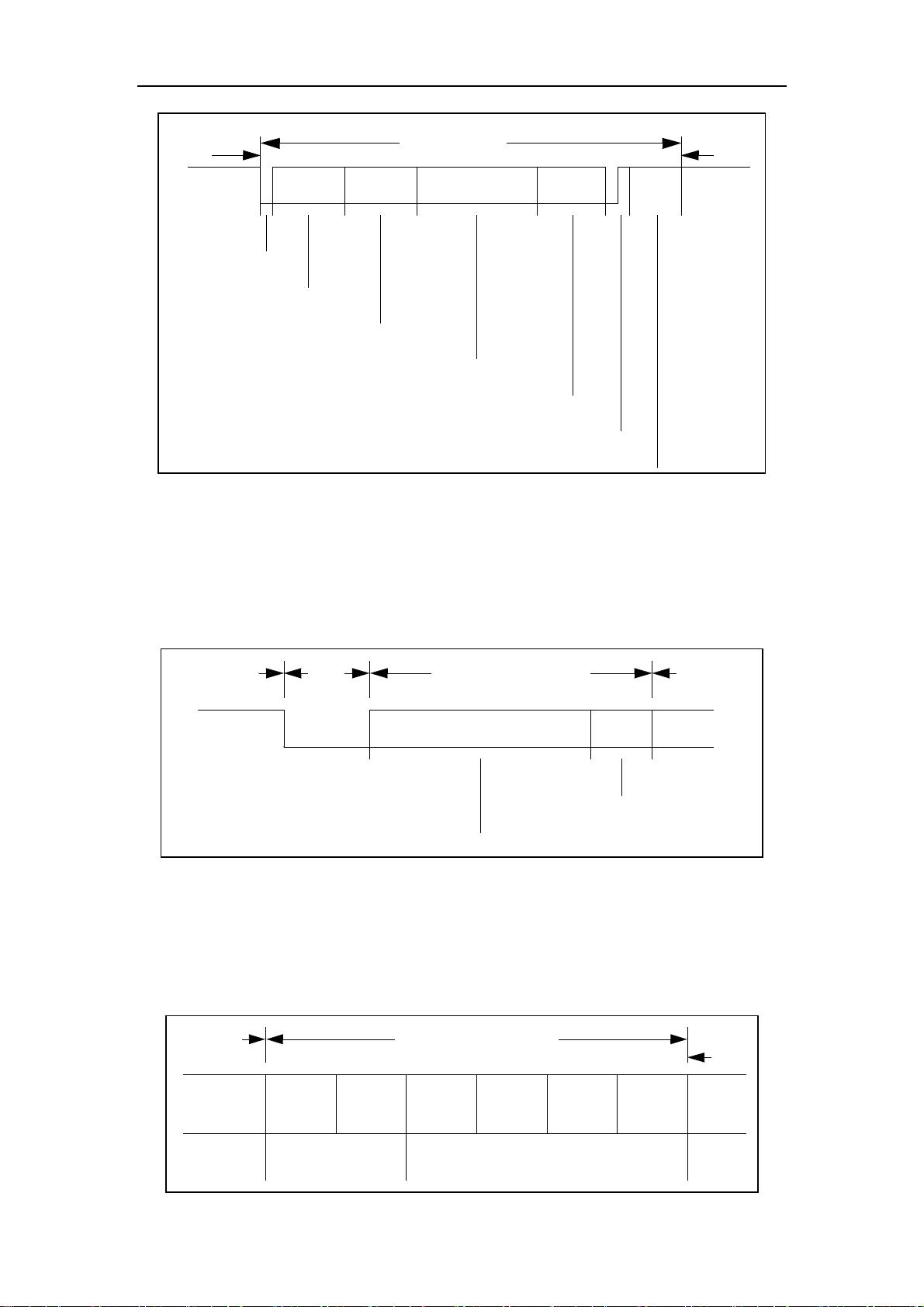
Interframe
Space
Interframe
Space
Start of Frame
Arbitrat ion Field
Cont rol Field
Data Field
CRC F i el d
AC K F ield
End of Frame
or
Overload
Fr a me
DATA F RAME
仲裁场
仲裁场包括识别符和远程发送请求位(RTR)。
识别符:识别符的长度为 11 位。这些位的发送顺序是从 ID-10 到 ID-0。最低位是 ID-0。最高的 7 位
(ID-10 到 ID-4)必须不能全是“隐性”。
RTR 位:该位在数据帧里必须为“显性”,而在远程帧里必须为“隐性”。
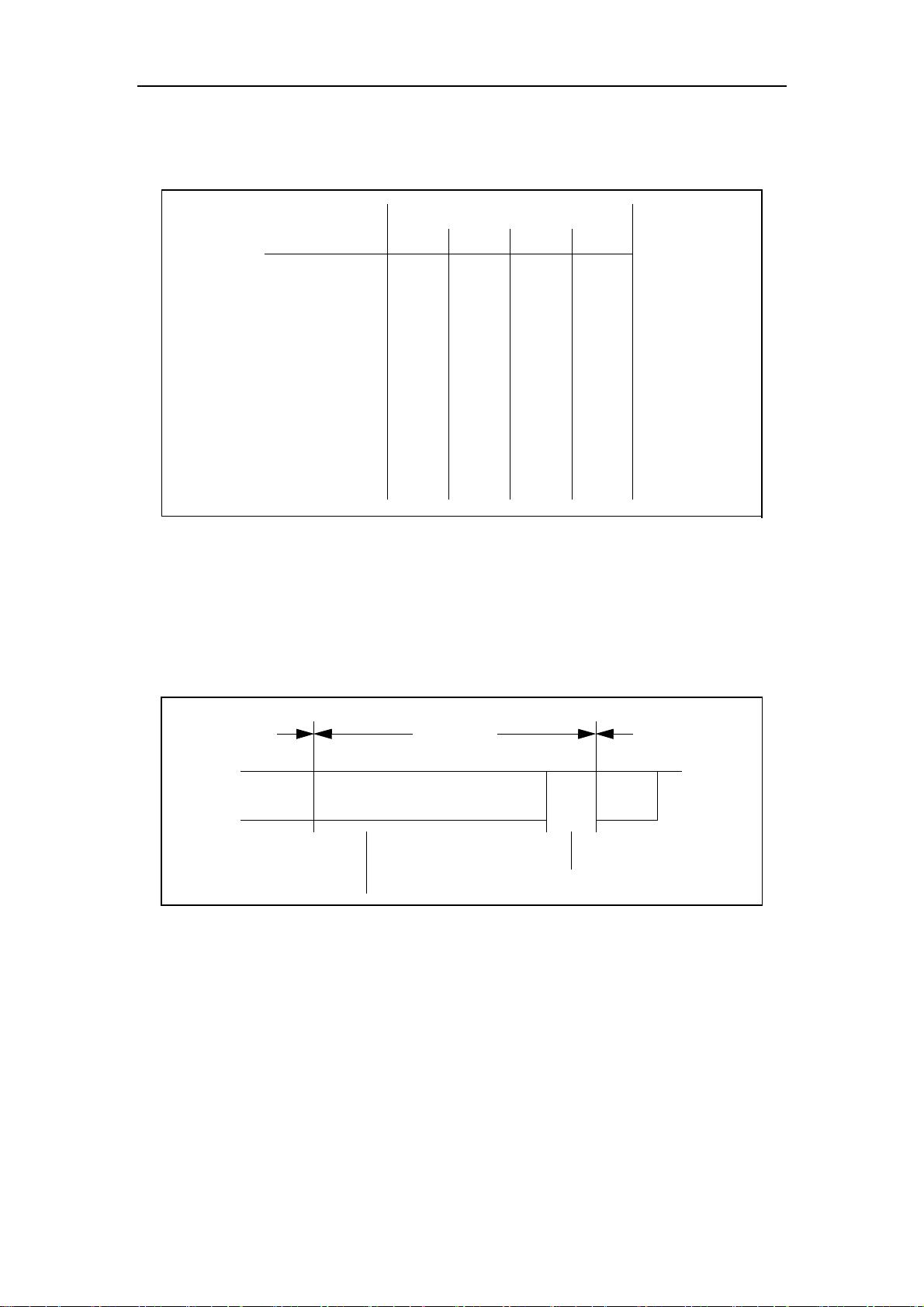
Interframe
Space
St a r t
of Frame
Identifier
RT R B i t
Co n t r o l
Fi e ld
AR BI TRATION F IELD
控制场
控制场由 6 个位组成,包括数据长度代码和两个将来作为扩展用的保留位。所发送的保留位必须为“显
性”。接收器接收所有由“显性”和“隐性”组合在一起的位。
数据长度代码:数据长度代码指示了数据场中字节数量。数据长度代码为 4 个位,在控制场里被发送。
r1 r0 DLC3 DLC2 DLC1 DLC 0
or
CRC
Fi e l d
Ar bit ration
Fi e l d
Dat a
Fi e l d
CO N T RO L F IE L D
Dat a Lengt h Codereserved
bits
剩余35页未读,继续阅读
2015-05-18 上传
2021-12-13 上传
2015-01-09 上传
2021-09-30 上传
2021-10-03 上传
2021-05-31 上传
点击了解资源详情
点击了解资源详情

shyj0719
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
