Scratch2与ROS结合:轻松入门机器人编程
92 浏览量
更新于2024-08-27
收藏 1.27MB PDF 举报
"使用Scratch2和ROS进行机器人编程学习"
在机器人编程教育领域,Scratch2和ROS(Robot Operating System,机器人操作系统)的结合提供了一种直观且有趣的入门方式。Scratch2是一种图形化编程语言,特别适合初学者,尤其是小学生,通过拖拽积木式的代码块来学习基本的编程概念。而ROS则是一个复杂的开源机器人软件框架,用于高级的机器人应用,如传感器处理、运动控制和导航等。
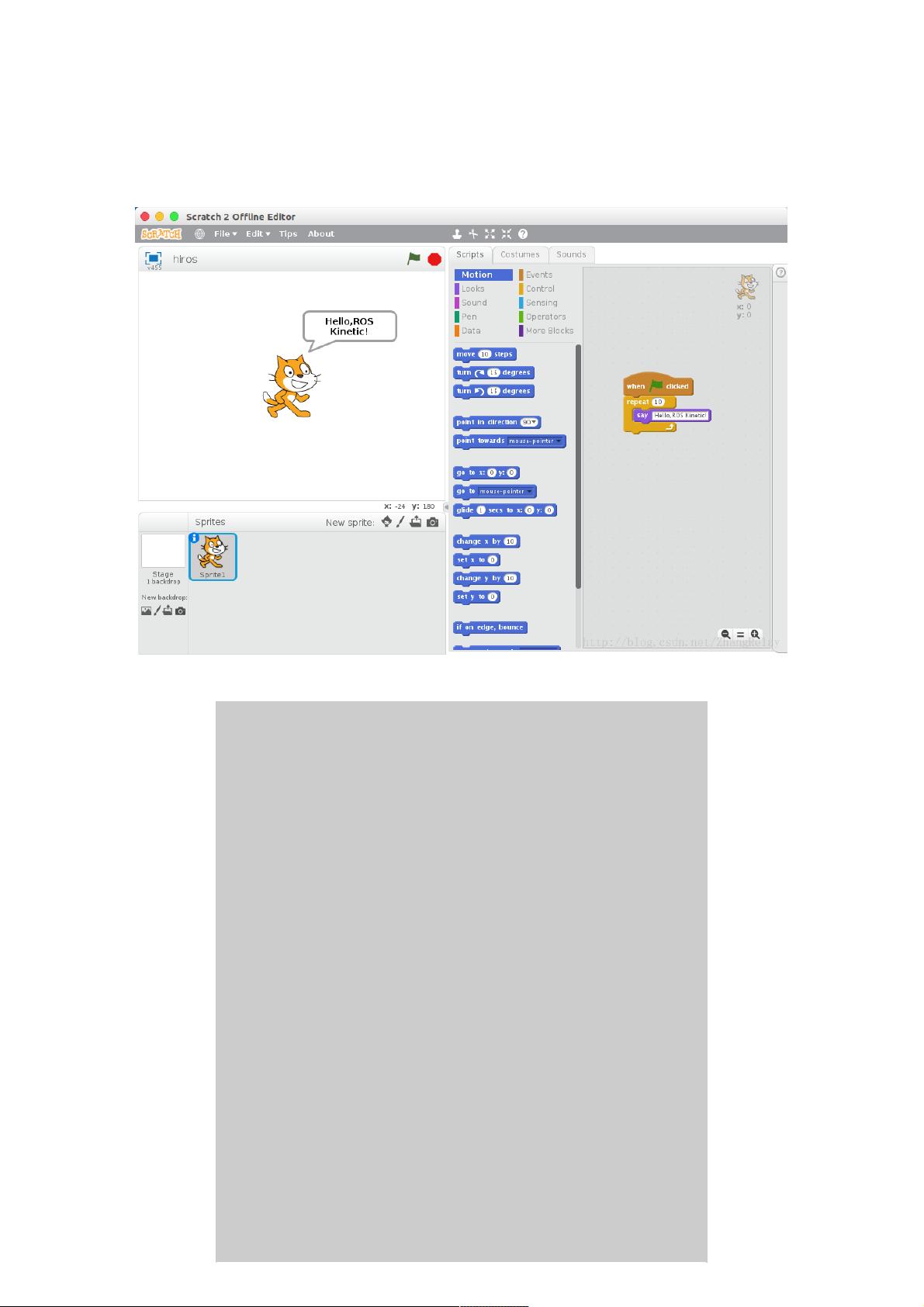
本文主要介绍如何利用Scratch2与ROS相结合,实现对机器人的控制。首先,通过一个简单的示例来展示这个过程。例如,创建一个名为“hiros.bz2”的项目,其中包含了一个简单的Scratch2程序:当绿色旗帜被点击时,机器人会连续说10次“Hello, ROSKinetic!”。这个项目可以通过专用工具如`scratch2python.py`转换成Python代码,便于ROS系统理解。
转换后的Python代码展示了如何在ROS环境中执行类似的功能。在这个例子中,代码会打印出“Hello, ROSKinetic!”10次,这相当于在ROS中的机器人说出相应的语音。需要注意的是,转换过程中可能会出现警告,如“Block<when@greenFlagclicked>not included yet”,这是因为某些特定的Scratch2积木块在转换时可能没有对应的ROS功能。
ROS的使用通常需要一定的编程基础,如Python和C++。在这个过程中,我们可以看到Python脚本中导入了多个库,如`time`、`config`、`sys`、`comm`、`os`、`yaml`,以及自定义的`Drone`和`Robot`模块。这些库和模块负责处理时间管理、配置加载、通信、文件操作和机器人控制等功能。
`execute`函数是实际运行的主体,它在一个循环中打印出问候语,模拟了Scratch2中的重复执行。同时,脚本还包含了错误处理机制,以应对可能的键盘中断。在主函数中,通过命令行参数读取配置文件,加载ROS和ICE(可能是Inter-Component Communication Engine)的参数,并根据配置创建`Drone`或`Robot`对象,从而与物理世界中的机器人进行交互。
通过这种方式,学生可以从Scratch2的简单编程开始,逐渐过渡到使用Python进行更复杂的机器人编程,形成一个平滑的学习曲线。这种教学方法不仅降低了学习门槛,也让学生能够逐步掌握ROS的精髓,为将来在大学阶段深入学习机器人技术打下坚实基础。
使用使用Scratch2和和ROS进行机器人编程学习进行机器人编程学习
1 先看如下一个简单的示例
1.1 新建hiros.bz2,如下:
1.2 通过下面命令将其转为Python:
下载后可阅读完整内容,剩余6页未读,立即下载
2021-05-12 上传
2021-08-14 上传
2021-10-15 上传
2021-10-16 上传
2021-02-04 上传
2021-09-02 上传
153 浏览量
点击了解资源详情
点击了解资源详情

weixin_38683562
- 粉丝: 6
- 资源: 970
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
