RGB-D驱动的移动机器人室内自主探索与地图构建策略
21 浏览量
更新于2024-08-26
收藏 1.09MB PDF 举报
该研究论文主要探讨了一种创新的基于RGB-D(RGB颜色和深度图像)的移动机器人在未知室内环境中的自主探索和地图构建方法。RGB-D传感器能够提供丰富的三维空间信息,这对于机器人在复杂环境中导航至关重要。研究人员首先利用这些传感器的数据实时构建3D点云地图,通过对定位点的处理和闭环检测,确保地图的精确性和完整性。
在这个过程中,作者将探索任务抽象为部分可观测的马尔可夫决策过程(Partially Observable Markov Decision Process, POMDP),这是一种适用于不确定环境中决策制定的问题模型。通过结合局部地图推演策略,机器人能够根据当前的观察和记忆动态调整其行为,同时全局边界搜索策略则帮助机器人寻找尚未探索区域的边界,从而实现全局视野下的高效探索。
为了克服可能的局部最优陷阱,研究者采用了动态窗运动控制方法,这种策略允许机器人在保持稳定性的前提下,不断调整其运动路径,持续向未知区域推进。这样,机器人能够在未知环境中既保证了自主性,又避免了因局部信息限制而产生的停滞或误判。
实验室环境下的实地实验验证了这种方法的有效性。通过一系列的探索任务,研究人员证明了基于RGB-D的移动机器人能够有效地进行自主探索,并能实时构建出准确的地图,这对于机器人在智能家居、物流配送、搜索救援等应用场景具有重要的实际意义。
总结来说,这篇研究论文的核心贡献在于提出了一种融合RGB-D信息处理、自主决策和动态规划的移动机器人探索与建图算法,为解决未知室内环境中的导航问题提供了一种新的解决方案。其技术优势和实验证明表明了其在现代机器人技术领域的先进性和实用性。
862 机 器 人 2017 年 11 月
定的移动机器人运动规划与控制,在室内环境中自
主运动并构建 3D 点云地图
[27]
的方法.
本文提出了一种基于 RGB-D 信息的移动机器
人未知室内环境自主探索与地图构建方法.主要创
新点为:1) 面向未知环境探索任务,实现了仅基于
RGB-D 传感器信息构建环境的 3D 点云及 2D 栅格
地图;2) 基于 RGB-D 信息所建立的 2D 栅格地图,
结合局部地图推演及全局边界搜索,建立自主探
索策略,避免陷入局部最优,保证探索任务能够完
成;3) 实现了由一个移动平台、一个计算平台和一
个 RGB-D 传感器构成的移动机器人系统,在无需
用户干预的前提下实现了对未知室内环境的自主探
索与地图构建.这一系统架构简单、通用性好,构
建的 3 维点云地图相对于传统自主探索方法构建的
2 维地图,信息量更丰富,直观易辨认,便于用户
观察.
2 基 于 RGB-D 信 息的 3D 点 云 地图 实时
构建(Real-time 3D point cloud mapping
with RGB-D data)
基于 RGB-D 传感器提供的信息,通过定位点
生成、地图构建与闭环检测,实时构建 3D 点云地
图.
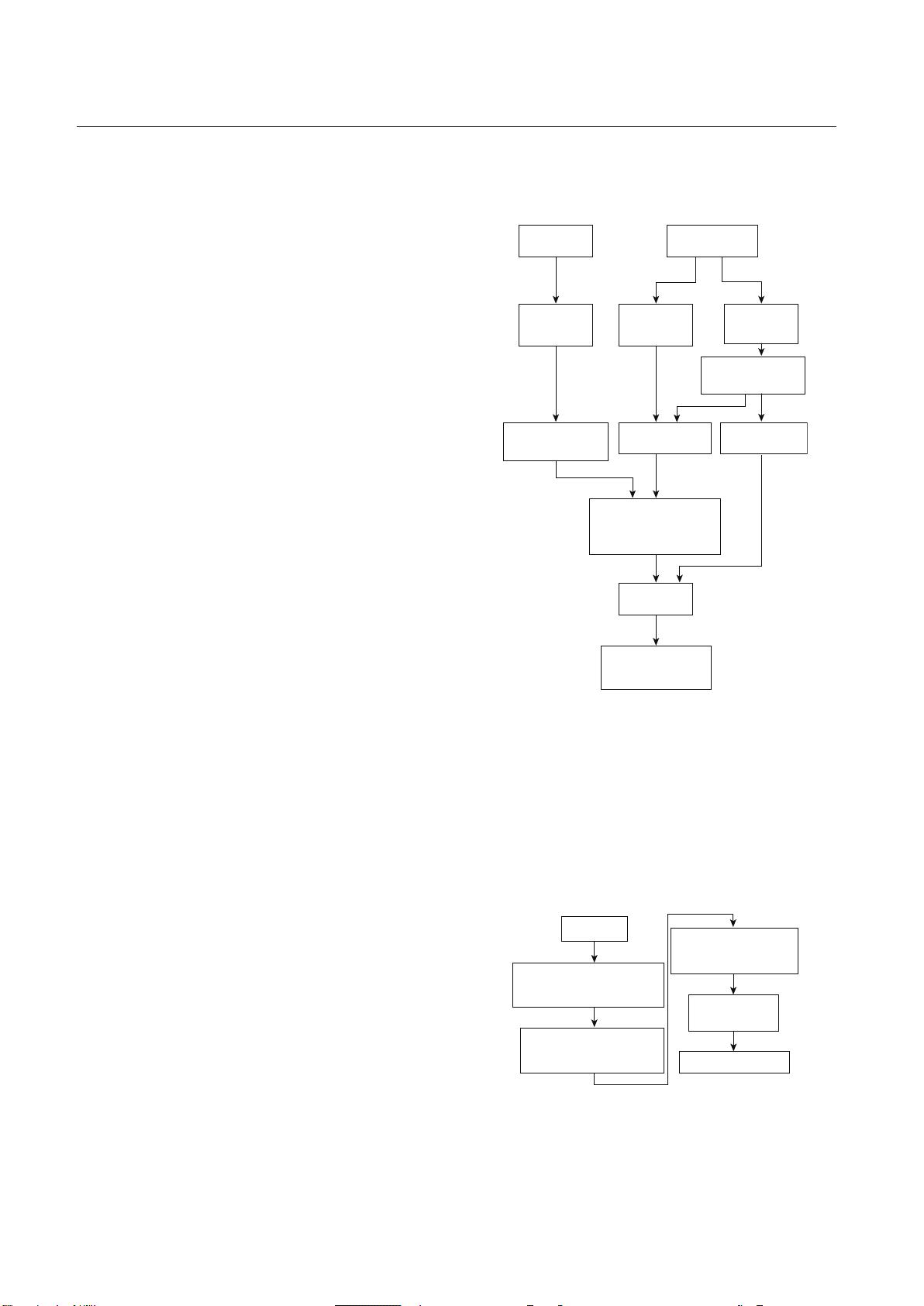
2.1 定位点生成
定位点生成流程如图 1 所示.首先,根据 RGB-
D 传感器提供的 RGB 信息,提取 ORB(oriented
brief)特征点及其描述子,并与对应的深度信息整
合为 3D 特征点.然后,对 2 帧间匹配的 3D 特征点
首先基于极线约束计算基本矩阵,判断正确匹配点
(inliers)是否足够.在足够多正确匹配点的基础上,
截取码盘里程计上一帧与当前帧之间的位姿变换作
为前后 2 帧 RGB-D 位姿变换的初始估计.对 2 帧
间匹配的 3D 特征点进行基于 PnP 的 RANSAC (随
机抽样一致性)估计,得到帧间位姿,作为 RGB-D
定位信息.同时,ORB 特征点对应生成词袋(bag
of words)向量.环境词典是由词袋向量增量式构
建的,不需要在目标环境下进行训练,符合自主探
索任务的要求.以上信息构成当前一帧的签名 S
t
,
将 S
t
与时间戳 t 合并为定位点 L
t
,并初始化定位点
与上一定位点的边,设权重值为 0,从而完成当前
一帧 RGB-D 与码盘里程计信息流的处理.
在未知环境中,尤其在特征较少、光照变化较
大的环境中,可能出现深度信息、 特征点匹配误
差,从而发生 RGB-D 定位信息的跳变现象,对移
动机器人平台实时的运动控制造成不利的影响;码
盘信息变化平稳,但存在累积误差的问题.因此,
通过 EKF (扩展卡尔曼滤波)算法对视觉定位信息
与码盘定位信息进行融合.
䘀ࣘᓅⴈ
⸱ⴈ䟼〻䇑
ؑ
RGB
മۿؑ
␡ᓖമ
ۿؑ
⭏ᡀㆮ
S
t
RGB-DՐᝏಘ
ᨀORB⢩ᖱ⛩
ᒦ⭏ᡀ᧿䘠ᆀ
ᡚᑗ䰤սု
Ѫࡍՠ䇑䟿
⭏ᡀ3D⢩ᖱ⛩
⭏ᡀ䇽㺻䟿
ᶱ㓯㓖ᶏࡔᯝ৺
สҾPnPⲴRANSAC
սုՠ䇑
ሶS
t
оᰦ䰤ᡣt
ᒦѪᇊս⛩L
t
图 1 定位点的生成流程
Fig.1 Creation process of location points
2.2 地图构建与闭环检测
地图构建与闭环检测环节通过图优化与内存管
理方法形成紧耦合,从而保证建图过程的实时性与
稳定性.TORO(Tree-based netwORk Optimizer)图
优化框架
[28]
对不同定位点的相似度与位姿关系进
行优化,保证全局一致.
ᇊս⛩L
t
ሶL
t
࣐ޕTOROമՈ
ṶˈѪമⲴᯠ亦⛩
䇑㇇L
t
Ⲵլᓖλ ᒦᦞ
↔ࡔᯝᱟ䖭ޕ
WM
ICP䇑㇇
L
t
սုˈമ
Ո؞↓⛩Ӂൠമ
䰝⧟Ự⍻ˈ
ᴤᯠᆈ
ᴤᯠ3D⛩Ӂൠമ
图 2 地图构建与闭环检测流程
Fig.2 The mapping and loop closure detection process
内存管理策略根据定位点的相似度,判断其存
储在工作内存(WM)或是长期内存(LTM),具
体流程如图 2 所示.WM 存储相似度符合条件的
剩余11页未读,继续阅读
2022-12-16 上传
点击了解资源详情
2022-08-03 上传
2022-08-04 上传
2022-08-03 上传
2021-08-14 上传
2022-08-03 上传
2022-08-04 上传
2022-11-03 上传

weixin_38597300
- 粉丝: 6
- 资源: 982
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
