基于IEC611313和PLCopen的运动控制功能块:硬件无关的可重用设计
20 浏览量
更新于2024-08-04
收藏 72KB DOCX 举报
本文档探讨了如何利用IEC 61131-3和PLCopen标准来实现独立于硬件的运动控制功能块,以便在工业自动化中创建可重用的解决方案。IEC 61131-3是一种国际电工委员会制定的编程标准,涵盖了梯形图、指令表、结构文本、功能块图和顺序功能图表等多种编程语言,而PLCopen则是一个针对PLC的开放接口标准,促进了不同厂商设备之间的兼容性和互操作性。
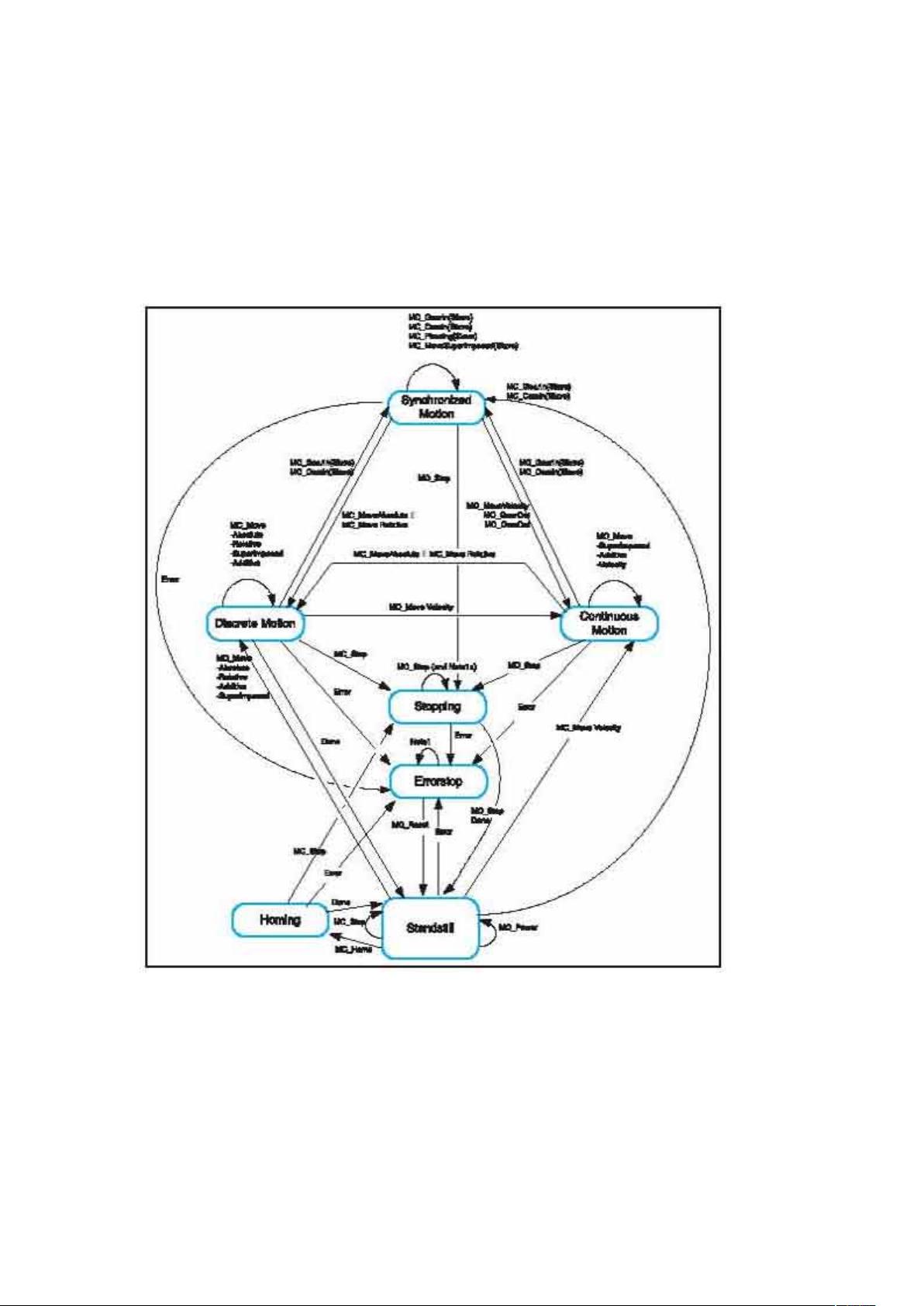
首先,文档详细解释了七种关键的状态,包括保持静止、回原位、离散运动、持续运动、同步运动、停止和故障停止。这些状态定义了运动控制流程,如正常过程从静止开始,然后可以通过命令实现轴的移动、停止以及故障恢复。例如,从静止状态,通过发布命令可以启动离散或持续运动,停止状态下则回到静止,故障时进入故障停止,人工干预后通过重启命令回到静止并准备重新运行。
功能块集的设计旨在提高效率和灵活性。基础功能块对应于底层的控制命令,用于管理每个轴的运动。通过增加中间层,可以减轻处理负担,提高系统的可扩展性和性能。同时,定义了两种功能块输入输出集:基本集和扩展集,以适应未来的扩展需求。
轴的数据类型和实例使用了Axis_Ref,这是一种通用的数据结构,包含了轴的索引,由所有制造商支持,用于电机和驱动器的接口。Axis_Ref作为一个输入输出变量在功能块图中体现,其值存储在功能块外部,可以在内部修改并与外部变量交互,使得不同制造商的系统在用户层面具有统一的接口。
举个例子,一个包含多个功能块的程序可能在循环模式下运行,比如每毫秒一次。通过轴引用,每个功能块都能获取和更新轴的位置信息,然后驱动电机执行相应的动作。这种方法使得系统设计不依赖于具体的硬件,而是基于数据结构,允许创建虚拟轴,增强了系统的灵活性和模块化。
MC_MoveAbsolute函数用于在给定的绝对位置上命令被控运动,而MC_MoveRelative则允许根据当前位置执行指定距离的相对运动。这两种运动控制指令在实现精确和灵活的运动控制方面发挥了重要作用。
本文档提供了如何利用IEC 61131-3和PLCopen技术构建可重用的运动控制功能块,以标准化和简化工业自动化系统的开发和维护。通过这种方式,工程师可以编写更高效、易于维护的代码,同时也提高了系统的整体兼容性和扩展性。
利用 IEC611313 和 PLCopen 的运动控制功能块来创
建独立于硬件的可再用
定义了七种状态
1.保持静止 2.回原位 3.离散运动 4.持续运动 5.同步运动 6.停止
7.故障停止
正常过程都从静止开始。在此状态下,每个轴都可连通电源(通过供电命
下载后可阅读完整内容,剩余7页未读,立即下载
2021-12-02 上传
2021-08-14 上传
点击了解资源详情
点击了解资源详情
2023-09-10 上传
2023-06-13 上传
2023-09-15 上传
2021-12-16 上传

zzzzl333
- 粉丝: 809
- 资源: 7万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 毕业设计&课设--分享一个适合初学者的图书管理系统(毕业设计)无框架原生.zip
- marvel_api
- Chrome-Memory-Manager:此扩展仅在 chrome 的开发者频道上有效。 Chrome合金
- Broad-Learning-System:BLS代码
- 毕业设计&课设--东北大学本科毕业设计模板.zip
- mcmc_clib:C程序简化ODE模型参数的歧管MALA采样
- yii2-meta-activerecord:一个简单的Yii2扩展,扩展了ActiveRecord功能,以允许在补充表中使用WordPress样式的元字段
- job-recover-client:JobRecover的客户端文件(前端)
- TestDrive-Titanium:使用这个空白的 Titanium 应用程序试驾 Kinvey
- final-form-focus::chequered_flag:最终表单“装饰器”,它将在尝试提交表单时尝试将焦点应用于第一个字段,但会出现错误
- keras-recommendation:使用Keras实施推荐系统
- Excel模板年度工程类中初级打分汇总表.zip
- GoIT-Course:这是我在GoIT课程中的第二门课程
- 毕业设计&课设--高校毕业设计管理系统(毕业设计).zip
- PyTorchZeroToAll:DL-SEMINAR第1周任务
- Geo_Aggs-Map
