姿态控制详解:0.2mpu6050在载体坐标系与地理坐标转换中的关键角色
需积分: 0 185 浏览量
更新于2024-08-04
收藏 871KB DOCX 举报
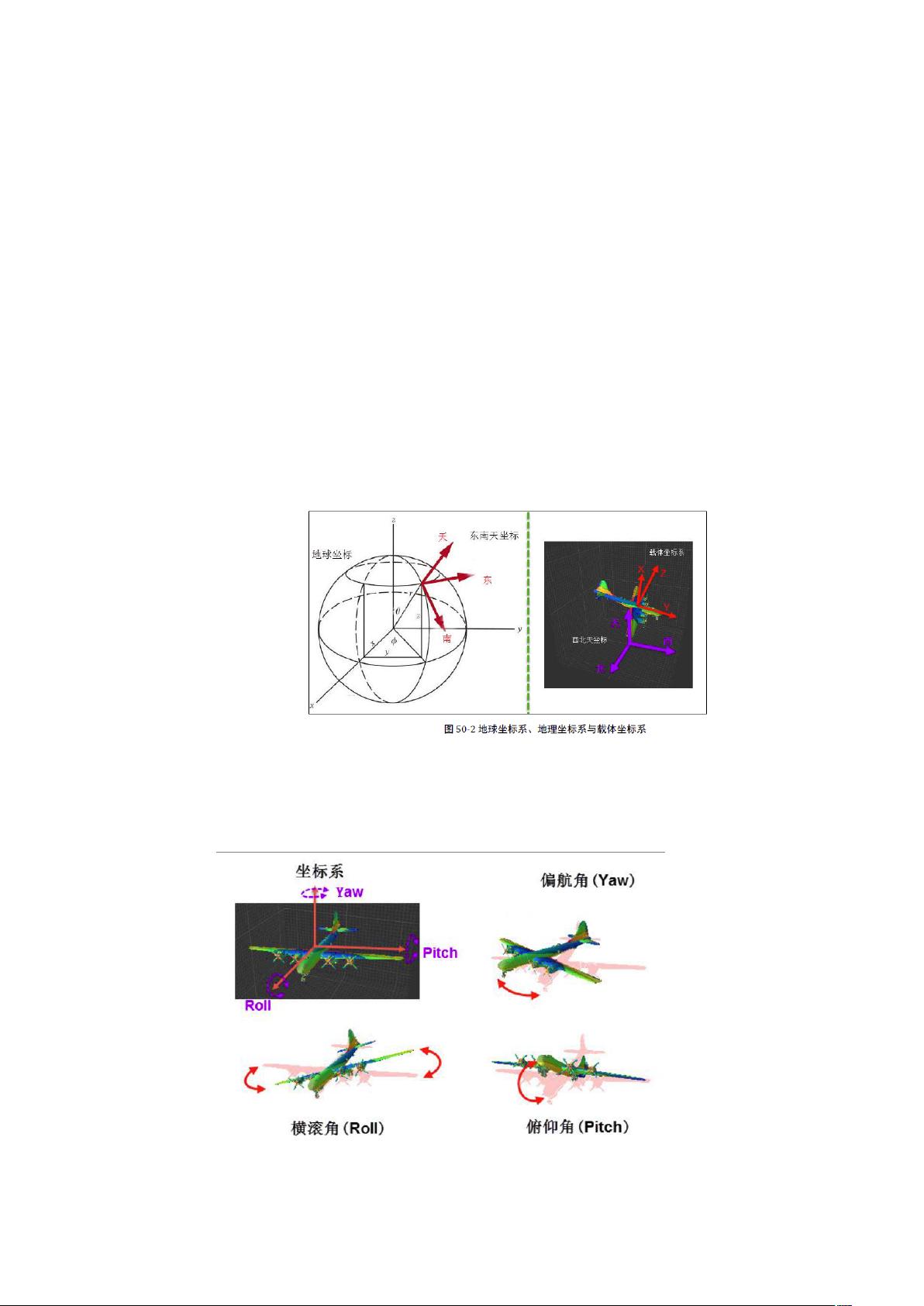
在《野火》第50章中,关于STM32相关的知识点主要聚焦于姿态控制技术,特别是在处理微处理器如0.2MPU6050时的理解。姿态控制是关键的传感器技术,它涉及到如何在电子设备中确定其相对于地球或其他参照框架的位置和方向,即“载体坐标系”与“地理坐标系”的转换。
姿态概念的核心在于描述物体在空间中的位置变化,比如飞机的飞行姿态。初始状态下,载体坐标系和地理坐标系应重合,任何坐标轴的移动或旋转都会反映物体的不同姿态参数,如偏航角(Yaw)、俯仰角(Pitch)和横滚角(Roll)。这些角分别对应于物体在三维空间中的左右、上下和侧倾变化。
- 偏航角(Yaw):当载体的Z轴旋转时,与地理坐标系的Y轴形成的角度,反映了飞机的左右偏离。
- 俯仰角(Pitch):由载体的X轴旋转导致的,衡量了飞机的机头向上或向下的角度变化。
- 横滚角(Roll):源自载体的Y轴旋转,表示飞机双翼的左右摆动。
理解这些角的计算方法对于正确解读传感器数据至关重要。在这个案例中,陀螺仪作为核心传感器被提及,因为它们能够测量这些角的变化,即便是在没有外部参照的情况下也能提供稳定的姿态信息。0.2MPU6050可能是一种包含陀螺仪功能的微控制器,用于实现精确的姿态感知和控制,这对于飞行器、机器人导航以及其他依赖精准定位的系统来说非常重要。
《野火》第50章关于0.2MPU6050的知识点深入探讨了姿态控制技术的基础概念,包括坐标系的定义和如何通过陀螺仪实时测量并调整姿态参数,这对于从事STM32开发,特别是与姿态跟踪相关的应用开发者来说是一份重要的参考资料。
参考《野火》第 50 章
拿芯片时,要拿着线改变姿态!!!!而不是拿着芯片晃动!!!
一, 姿态基本概念
1. 姿态:姿态就是“载体坐标系”和“地理坐标系”之间的转换关系。初始状
态“载体坐标系”和“地理坐标系”想重合,根据“载体坐标系”和“地理
坐标系”之间的差值变化来反应物体的姿态。(例如初始状态“地理”和“载
体”z 朝上,“载体”的 z 突然朝下,则“地理”和“载体”z 相反,判断出
物体翻了)
地球坐标系:地球球心为原点,z 轴即地球自转轴,xy 轴在赤道切面上,y 轴指向
本初子午线。(GPS 模块讲经纬度用到这个坐标)
地理坐标系:物体在地球表面所在的点为原点。重力方向的反方向为 z 轴正方向。
xy 轴切向经纬线。分为“东北天(x 指东 y 指北 z 指天),东南天(x 指东 y 指南),西北
天(x 指西 y 指北)”等坐标。(平常用的最多的,就实际中的东南西北)(笛卡尔坐标系)
载体坐标系:物体质心为原点,z 指向物体顶部,y 指向物体头部,x 指向物体两侧
如图“地理”y(紫色)与“载体”y(红色)夹角为负,判断出飞机要降落
2. 通过“地理”和“载体”的关系得出姿态,即引出三个角偏航角(Yaw) ,
俯仰角(Pitch),横滚角(Roll)
之前的理解不正确,概念模糊,下文正确的描述下。
下载后可阅读完整内容,剩余5页未读,立即下载
2022-09-15 上传
2022-09-15 上传
2022-07-15 上传
2022-07-15 上传
2022-07-13 上传
2022-07-15 上传
2022-09-23 上传
2021-09-29 上传
2022-09-23 上传

以墨健康道
- 粉丝: 34
- 资源: 307
 我的内容管理
展开
我的内容管理
展开







最新资源
- torch_sparse-0.6.12-cp37-cp37m-linux_x86_64whl.zip
- React-Native-Navigation-V5
- 33code-data.zip_matlab例程_MathCAD_
- Yod Framework开发框架最新官方版
- 0911Homework-1:毫无意义的文件处理
- frontend-nanodegree-mock-portfolio:Udacity前端纳米P1
- 亚马逊客户零售分析解决方案:深入研究亚马逊的前100名排名方法,研究700多种产品,再加上广泛的电子商务分析解决方案,以增强客户定位和促销范围
- Todo_Hooks_MaterialUI:TODO basico hecho con React +挂钩+ MaterialUI + SASS
- GoldenEgg:“学习虚幻引擎4的C ++编程”资源库
- 毕业设计&课设-基于MATLAB的车辆漂移动力学仿真.zip
- mybatis-pages:MyBatis 插件Interceptor实现分页 数据库表查询的分页
- go-filewatcher:轻量级FileWatcher
- 灿烂之春flash季节贺卡
- 使用C#打印商品出库单据
- CDC DTK Extension-crx插件
- 毕业设计&课设-机载电子战系统中的测向.zip
