UAVCAN协议在px4实践中的详细介绍与应用
在"px4中uavcan协议介绍与实操"这篇文档中,作者尉世乾深入探讨了UAVCAN协议在PX4(一套开源的飞行控制系统)中的应用。首先,文章介绍了CAN(Controller Area Network)总线的基本概念,它是工业界广泛应用的实时通信协议,最初由博世公司为汽车电子系统设计,以其实时性强、抗干扰、成本低等特点著称。CAN总线分为高速和低速两种类型,这里主要关注高速CAN,它支持显隐电平的物理仲裁,确保数据传输的准确性。
CAN总线数据帧包括数据帧、远程帧、错误帧、过载帧和帧间隔五种类型,每种帧都有其特定的用途和结构。数据帧是最常见的类型,用于传输数据,包含仲裁场、控制场、数据场和CRC校验,以防止数据错误。位填充编码机制确保了数据帧的完整性,当检测到连续五个相同位时,会自动插入一个补充位,以避免因连续第六个相同位导致的填充错误。
UAVCAN(Unmanned Aircraft Vehicle Control Applications Network)是专门为无人机和其他自主系统设计的高性能通信协议,它基于CAN技术,但提供了更高的数据速率和更复杂的错误处理机制。在px4中,UAVCAN被用来实现无人机之间的通信,例如传感器数据共享、控制指令交换以及状态同步。通过UAVCAN,px4能够实现分布式系统间的高效协作,提高系统的可靠性和实时性。
实操部分可能会涉及如何在px4中配置和使用UAVCAN,包括设置CAN设备、编写节点代码以发送和接收数据、以及处理UAVCAN的错误和中断。此外,还可能讨论如何通过UAVCAN与其他模块集成,如导航、避障或遥控系统,以优化无人机的整体性能。
这篇文章深入讲解了CAN总线的原理和UAVCAN在px4中的实际应用,对于从事无人机开发或对嵌入式系统通信感兴趣的读者来说,是了解和实践px4高级通信技术的重要参考资料。
SRR 位:只在扩展帧中使用,隐性位(1),1bit。
IDE 位:标准格式为显性(0),扩展帧格式隐形(1),1bit。
(按照之前的仲裁知识点,标准帧肯定要比扩展帧的优先级高。)
8. 协议帧实例
截取了北醒激光雷达的数据帧,略去 payload、crc、结束部分。
0000010000011011010000010000010000100001000
SOF
ID28bit-ID18bit
SRR
IDE
ID17bit-ID0bit
RTR
R1
R0
DLC
占 Bit 位
1
11
1
1
18
1
1
1
4
0
00000000010
1
1
010000000000000010
0
0
0
10000
二、 UAVCAN 概念
1. uavcan 简介
Uavcan 是基于 can-bus 基础上的一套通讯协议,目前基于 can-bus 基础的,还有比较著名的 canopen 与
devicenet 协议,相比来讲,uavcan 更加轻量级,占用内存更小,约 40K 左右,同时由于 can-bus 本身的
高速性能,他比较适合应用在一些实时嵌入式系统当中,如无人机控制器与机器人控制器。同时 uavcan 支
持毫秒级的网络同步,协议遵循 MIT。
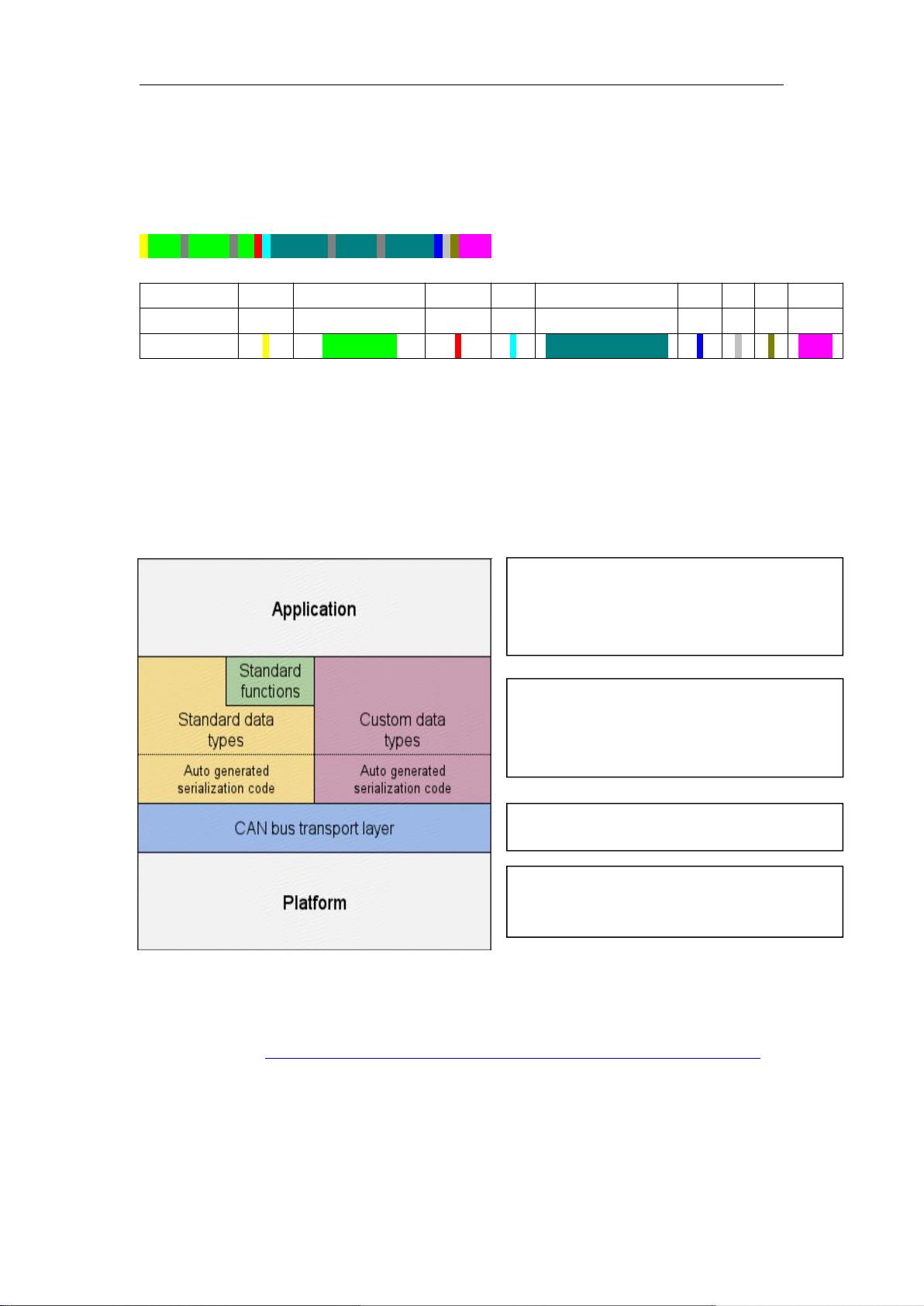
2. Uavcan 框架
Uavcan 架构
3. DSDL
Uavcan 协议里面有一个 DSDL 的概念,即 Data structure description language,即一种数据结构的描述
语言,详细请参考:http://uavcan.org/Specification/3._Data_structure_description_language/
应用已经获取了相应 ID 的数据,进行解析处理,用户可以添
加.cpp 进行处理,应用遵循一种订阅回调的方式进行数据的传
输
不同平台的 can-bus 驱动,获取 can 的 ID 与 payload 等数据,
传给 transport layer
通过解析 CAN 协议,对应相应的组包规则并传数据过去
DSDL 关键:
用户可以添加自定义的 ID 与数据项,并制定组包规则,uavcan
协议栈可以通过.py 脚本自动生成解包规则
剩余10页未读,继续阅读
472 浏览量
1024 浏览量
133 浏览量
955 浏览量
403 浏览量

laixiong_embed
- 粉丝: 14
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网页自动刷新工具 v1.1 - 自定义时间间隔与关机
- pt-1.4协程源码深度解析
- EP4CE6E22C8芯片三相正弦波发生器设计与实现
- 高效处理超大XML文件的查看工具介绍
- 64K极限挑战:国际程序设计大赛优秀3D作品展
- ENVI软件全面应用教程指南
- 学生档案管理系统设计与开发
- 网络伪书:社区驱动的在线音乐制图平台
- Lettuce 5.0.3中文API文档完整包下载指南
- 雅虎通Yahoo! Messenger v0.8.115即时聊天功能详解
- 将Android手机转变为IP监控摄像机
- PLSQL入门教程:变量声明与程序交互
- 掌握.NET三层架构:实例学习与源码解析
- WPF中Devexpress GridControl分组功能实例分析
- H3Viewer: VS2010专用高效帮助文档查看工具
- STM32CubeMX LED与按键初始化及外部中断处理教程
