深度学习预测驾驶员意图:通过视觉信号理解驾驶行为
版权申诉
151 浏览量
更新于2024-09-09
收藏 4.21MB PDF 举报
"DeepSignals- Predicting Intent of Drivers Through Visual Signals.pdf"
本文主要探讨了如何通过视觉信号预测驾驶员的意图,这对于无人驾驶技术的发展至关重要。DeepSignals是作者提出的一种方法,利用深度神经网络来处理视频序列中的空间和时间信息,以检测驾驶员是否在使用转向灯或紧急闪光灯来传达其行驶意图。
I. INTRODUCTION
自动驾驶是人工智能领域最具影响力的应用之一,它有可能彻底改变我们的生活方式。然而,在自动驾驶汽车成为常态之前,人类和机器人需要共享道路。在这种共存的场景下,车辆间的通信至关重要,能够预警其他道路使用者可能发生的突然或危险动作。因此,理解人类驾驶员的意图对于自动驾驶技术的进步具有深远意义。
II. DEEP SIGNALS 方法
DeepSignals利用深度学习模型来分析视频流,该模型设计用于理解空间信息(如驾驶员的手势、面部表情和车辆周围环境)以及时间信息(如信号的持续时间和模式)。这种方法的目标是准确预测驾驶员即将进行的行动,如变道、停车或紧急制动。
III. 模型架构
该模型可能包含卷积神经网络(CNN)用于处理图像数据,以及循环神经网络(RNN)或长短时记忆网络(LSTM)用于捕捉时间序列信息。通过这些网络的结合,模型可以学习到信号模式的动态变化,并将其与驾驶员的行为联系起来。
IV. 实验与评估
研究人员在超过一百万帧的视频数据上进行了实验,这些数据包含了各种复杂的驾驶环境和条件。实验结果显示,模型在每一帧的预测准确性上表现优秀,即使在极具挑战性的场景下也能保持高精度。这表明DeepSignals能够有效地处理实时的驾驶情况,为自动驾驶系统提供有价值的预判信息。
V. 应用与影响
这样的技术可以被整合到自动驾驶汽车的感知系统中,提高其对周围环境的理解和应对突发情况的能力。此外,它还能促进人车交互,让自动驾驶汽车更好地理解人类驾驶员的行为,减少潜在的交通事故。
VI. 结论
"DeepSignals: Predicting Intent of Drivers Through Visual Signals"的研究工作揭示了通过视觉信号预测驾驶员意图的可能性,为自动驾驶安全性和效率的提升提供了新的解决方案。随着技术的进一步发展,我们可以期待更智能、更安全的自动驾驶未来。
这篇论文在自动驾驶与人类驾驶交互的关键问题上提出了创新的解决思路,强调了理解和预测人类驾驶员意图的重要性,这对于构建更加安全的混合交通环境具有重大意义。通过深度学习技术,我们有望实现更高级别的车辆间沟通,推动自动驾驶技术的成熟。
DeepSignals: Predicting Intent of Drivers Through Visual Signals
Davi Frossard
1,2
Eric Kee
1
Raquel Urtasun
1,2
Abstract— Detecting the intention of drivers is an essential
task in self-driving, necessary to anticipate sudden events like
lane changes and stops. Turn signals and emergency flashers
communicate such intentions, providing seconds of potentially
critical reaction time. In this paper, we propose to detect these
signals in video sequences by using a deep neural network
that reasons about both spatial and temporal information. Our
experiments on more than a million frames show high per-frame
accuracy in very challenging scenarios.
I. INTRODUCTION
Autonomous driving has risen as one of the most impactful
applications of Artificial Intelligence (AI), where it has the
potential to change the way we live. Before self-driving cars
are the norm however, humans and robots will have to share
the roads. In this shared scenario, communications between
vehicles are critical to alert others of maneuvers that would
otherwise be sudden or dangerous. A social understanding
of human intent is therefore essential to the progress of self-
driving. This poses additional complexity for self-driving
systems, as such interactions are generally difficult to learn.
Drivers communicate their intent to make unexpected
maneuvers in order to give warning much further in advance
than would otherwise be possible to infer from motion. Al-
though driver movements communicate intent—for example
when drivers slow down to indicate that they will allow a
merge, or drive close to a lane boundary to indicate a desired
merge position—motion cues are subtle, context dependent,
and near-term. In contrast, visual signals, and in particular
signal lights, are unambiguous and can be given far in
advance to warn of unexpected maneuvers.
For example, without detecting a turn signal, a parked car
may appear equally likely to remain parked as it is to pull
into oncoming traffic. Analogously, when a driver plans to
cut in front of another vehicle, they will generally signal
in advance for safety. Buses also signal with flashers when
making a stop to pick up and drop off passengers, allowing
vehicles approaching from behind to change lanes, therefore
reducing delays and congestion.
These everyday behaviors are safe when drivers under-
stand the intentions of their peers, but are dangerous if visual
signals are ignored. Humans expect self-driving vehicles to
respond. We therefore consider in this work the problem
of predicting driver intent through visual signals, and focus
specifically on interpreting signal lights.
Estimating the state of turn signals is a difficult problem:
The visual evidence is small (typically only a few pixels),
1
Uber Advanced Technologies Group
2
University of Toronto
{frossard, ekee, urtasun}@uber.com
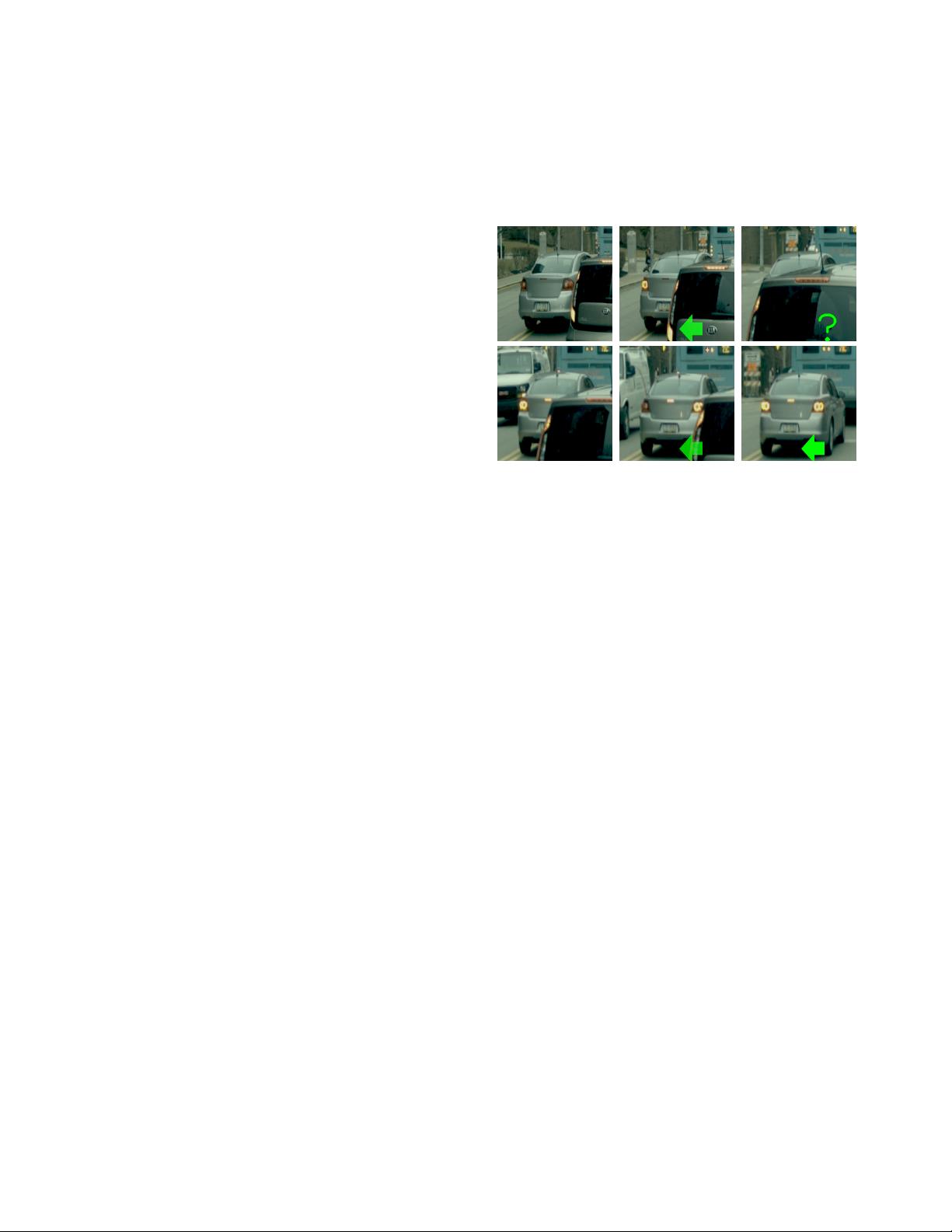
Fig. 1: A vehicle, signaling left, passes through occlusion.
The actor’s intent to turn left is correctly detected (left
arrow), including the occlusion (question mark).
particularly at range, and occlusions are frequent. In addition,
intra-class variations can be large. While some regulation
exists, many vehicles have stylized blinkers, such as light
bars with sequential lights in the direction being signaled,
and the regulated frequency of blinking (1.5 ± 0.5 Hz [1])
is not always followed. Furthermore, since we are interested
in estimating intent, vehicle pose needs to be decoded. For
instance, a left turn signal would correspond to a flashing
light on the left side of a vehicle we are following, but on
the other hand would correspond to a flashing light on the
right side of an incoming vehicle. We refer the reader to
Figure 2 for an illustration of some of the challenges of turn
signal estimation.
Surprisingly little work in the literature has considered
this problem. Earlier published works [2], [3] use hand-
engineered features, trained in-part on synthetic data, and
are evaluated on limited datasets. Other approaches have
considered only nighttime scenarios [4], [5]. Such methods
are unlikely to generalize to the diversity of driving scenarios
that are encountered every day.
In this paper, we identify visual signal detection as an
important problem in self-driving. We introduce a large-
scale dataset of vehicle signals, and propose a modern deep
learning approach to directly estimate turn signal states from
diverse, real-world video sequences. A principled network is
designed to model the subproblems of turn signal detection:
attention, scene understanding, and temporal signal detection.
This results in a differentiable system that can be trained end-
to-end using deep learning techniques, rather than relying
upon hard coded premises of how turn signals should behave.
We demonstrate the effectiveness of our approach on a
new, challenging real-world dataset comprising 34 hours of
下载后可阅读完整内容,剩余6页未读,立即下载
2021-10-02 上传
663 浏览量
2023-08-26 上传
273 浏览量
2021-04-14 上传
2021-03-13 上传
688 浏览量
2021-04-06 上传
145 浏览量

电动汽车控制与安全
- 粉丝: 279
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现ART与SART算法在医学CT重建中的应用
- S2SH整合版:快速搭建Struts2+Spring+Hibernate开发环境
- 托奇卡项目团队成员介绍
- 提升外链发布效率的SEO推广神器——搜易达网络推广大师v2.035
- C#打造简易记事本应用详细教程
- 探索虚拟现实地图VR的奥秘
- iOS模拟器屏幕截图新工具
- 深入解析JavaScript在生活应用开发中的运用
- STM32F10x函数库3.5中文版详解与应用
- 猎豹浏览器v6.0.114.13396 r1:安全防护与网购敢赔
- 掌握JS for循环输出的最简洁代码技巧
- Java入门教程:TranslationFileGenerator快速指南
- OpenDDS3.9源码解析及最新文档指南
- JavaScript提示框插件:鼠标滑过显示文章摘要
- MaskRCNN气球数据集:优质图像识别资源
- Laravel日志查看器:实现Apache多站点日志统一管理
