单片机控制的差速驱动导引小车路径控制与实验
版权申诉
124 浏览量
更新于2024-06-15
1
收藏 39.71MB PDF 举报
"基于单片机的差速驱动导引小车运动控制"
本文主要探讨了如何利用单片机实现差速驱动导引小车的运动控制。差速驱动是一种常见的移动机器人控制方式,通过左右两个轮子的不同转速来实现小车的转向和直线行驶。在自动导引车(AGV)领域,这种技术被广泛应用,因为它能够提供灵活的路径规划和精准的定位。
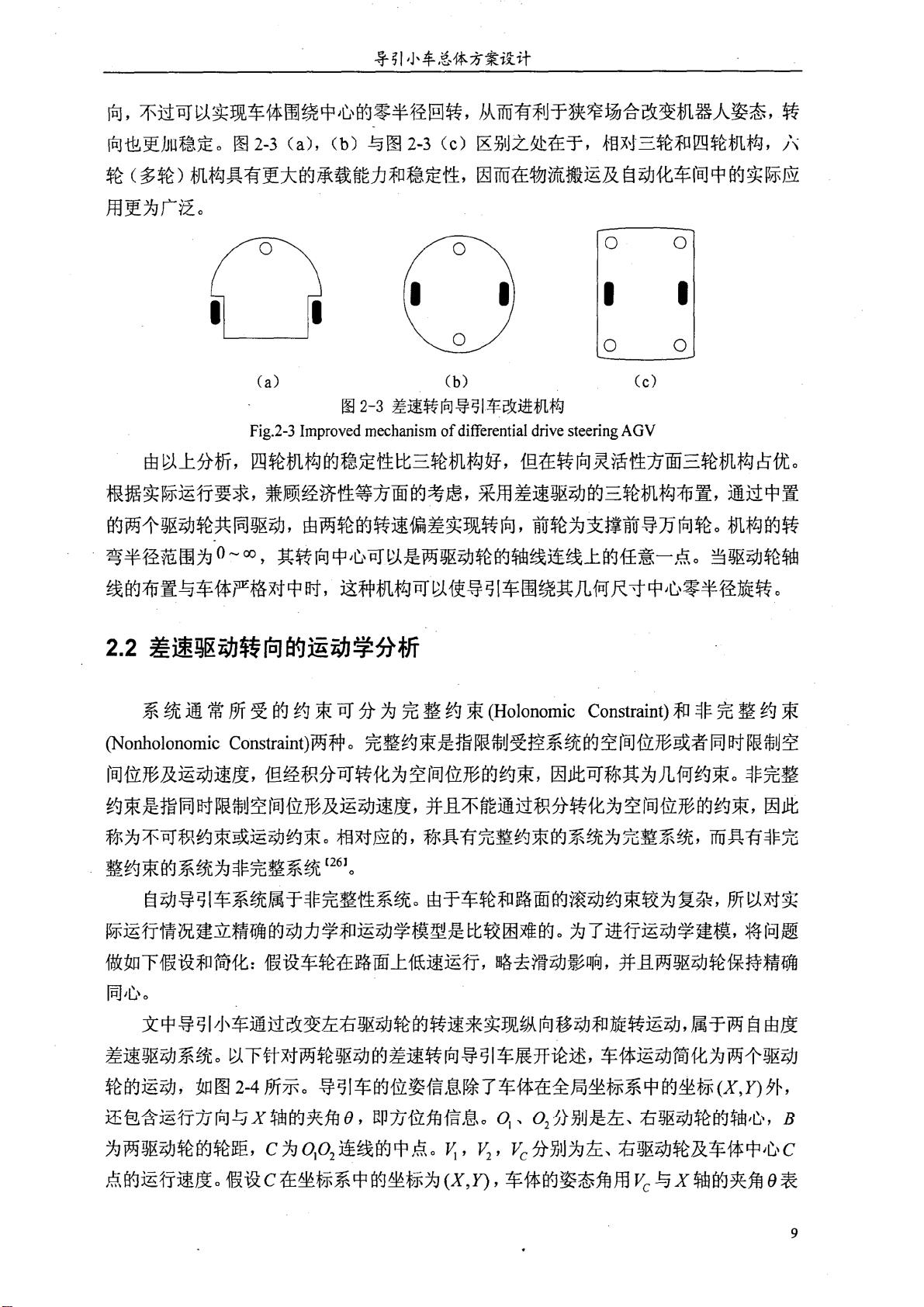
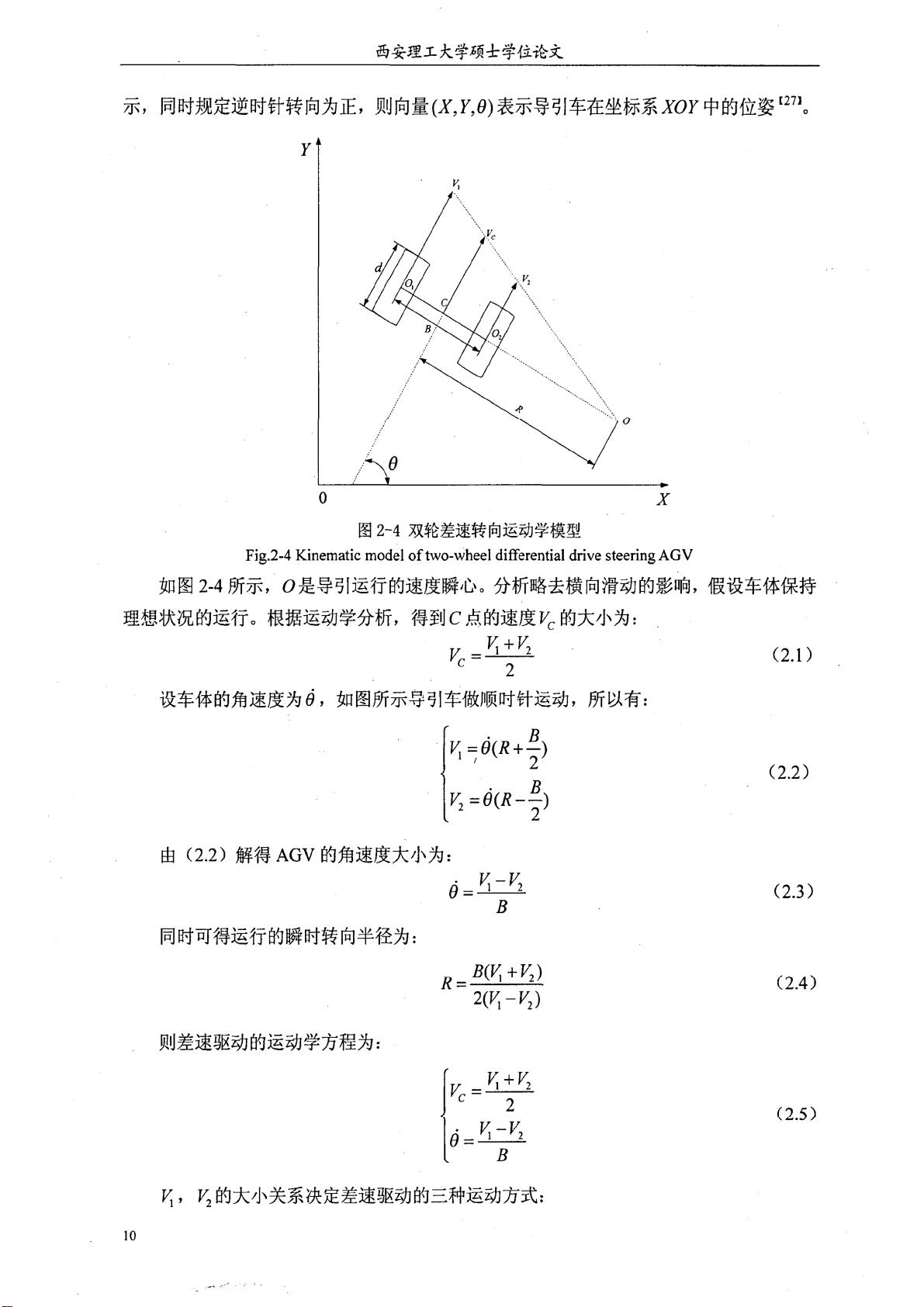
首先,文章深入分析了自动导引车的关键技术,特别是差速驱动转向机构的运动学特性。差速转向是通过对左右电机转速的独立控制来实现的,这使得小车能够在原地旋转或以任意角度转弯,增加了其在复杂环境下的导航灵活性。
接着,作者开发了整个系统的硬件电路和控制软件。硬件部分包括了主控单元(通常为单片机)、传感单元(如光电传感器用于导引)、电机驱动单元(用于控制电机的转速和方向)以及电源单元。软件部分则涵盖了各个功能模块的编程,如数据处理、路径规划和实时控制算法的实现。
在运动控制层面,论文特别强调了路径识别、定位和搜索等功能的控制原理和算法。这些功能对于AGV的自主导航至关重要。采用改进的分段积分分离PID算法,可以提高控制精度,适应小车在不同速度和环境条件下的动态响应,实现更平滑的路径跟踪和更准确的定位。
最后,作者构建了一个试验平台,通过实际运行测试了小车的各项功能,包括导引速度控制、纠偏能力、路径搜索以及避障能力。试验结果表明,小车能够有效地执行预定任务,验证了所设计的控制系统和算法的有效性,为后续的科研工作提供了可靠的软硬件基础。
关键词:自动导引车;差速驱动;单片机;脉宽调制;PID控制
这篇论文详细阐述了基于单片机的差速驱动导引小车设计与控制的全过程,展示了如何将理论知识应用于实践,为自动导引车领域的研究提供了有价值的参考。通过这一系统,我们可以看到单片机在智能移动机器人控制中的强大潜力,以及在实际应用中如何优化和改进控制策略以达到更高的性能标准。


171 浏览量
206 浏览量
109 浏览量
2024-11-08 上传
254 浏览量
2025-03-01 上传
2025-02-26 上传
177 浏览量
2021-09-20 上传

电气_空空
- 粉丝: 5354
 我的内容管理
展开
我的内容管理
展开







最新资源
- FlowReactiveNetwork: Android网络状态监听与Coroutines Flow集成
- 零基础SSH环境搭建教程与测试指南
- Win10下使用hiredis库实现C++操作Redis数据库
- 阿云里Redis集群安装与远程访问配置教程
- 办公电脑限制下高效利用文档资源的方法
- MaxDOS 9.3 版本发布:压缩包文件详细解析
- Stripe Checkout客户端POC实现与订阅滚动测试
- ANTLR 2.7.7源文件与JSTL的整合使用
- WordPress reCAPTCHA插件:轻量级安全防护
- SuperObject 1.25版本更新与XE2支持增强
- Laravel 5存储库模式:抽象和灵活的数据层管理
- 深入浅出CTreeCtrl类的递归技术及其应用
- Linux下的RAR压缩软件新版本发布 - rarlinux-5.9.1
- 系统延迟启动工具StartDelay——优化电脑开机速度
- REDHAT7.4平台下QT5.9.3+OpenGL三维坐标显示程序演示
- 深入理解EventBus总线使用及Demo演示
