改进的MGOBA算法:多径衰落信道下块自适应DFE优化
需积分: 9 12 浏览量
更新于2024-12-30
收藏 126KB PDF 举报
本文档主要探讨了一种新的改进型全局最优块自适应(MGOBA)算法,用于多径衰落信道下的块决策反馈均衡(DFE)。传统的全局最优块自适应算法(GOBA)专为处理实值信号设计,当块长度小于决策反馈均衡器系数的数量时,其递归过程可能无法正确工作。相比之下,MGOBA算法具有显著的创新性,它能够处理复值信号,并且其递归机制不受块长度和DFE系数数量的限制。
作者Terence Wang和Chin-Liang Wang针对无线通信系统中的快速衰落射频通道提出了这个算法。与传统的基于序列卡尔曼滤波器的自适应方法以及先前提出的其他最优块自适应算法相比,MGOBA算法在块自适应DFE的性能上表现出色,尤其是在处理多径衰落带来的信号失真方面。它通过优化滤波器参数的自适应更新,提高了信号的恢复质量,从而降低了误码率。
该算法的关键在于采用了块处理策略,将信号划分为固定大小的块进行处理,这在实时性和计算效率上具有一定优势。同时,MGOBA算法的设计考虑了复数域的运算,使得它不仅适用于无线通信系统,也可能扩展到其他需要复数信号处理的领域,如雷达和通信信号分析。
总结来说,本文的工作在于提出了一种通用的自适应滤波技术,适用于多路径环境下的通信系统,特别是在处理快速变化的无线信号时,其优越的性能使得它在通信工程和信号处理领域具有广泛的应用潜力。对于研究者和工程师来说,这是一项值得深入研究和实践的技术,它有可能推动未来通信系统的性能提升和复杂环境下的信号传输优化。
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—II: ANALOG AND DIGITAL SIGNAL PROCESSING, VOL. 44, NO. 10, OCTOBER 1997 877
A New Block Adaptive Filtering Algorithm for
Decision-Feedback Equalization of Multipath
Fading Channels
Terence Wang and Chin-Liang Wang
Abstract—This brief presents a modified general optimum block adap-
tive (MGOBA) algorithm for block adaptive decision-feedback equal-
ization (DFE) of multipath fading channels. Unlike the original GOBA
algorithm, which was proposed only for processing real-valued signals
and its recursion cannot work correctly for adaptive DFE when the
block length is less than the number of decision-feedback equalizer (also
abbreviated to DFE) coefficients, the MGOBA algorithm can process
complex-valued signals and its recursion has no constraints on the block
length as well as the number of DFE coefficients. As compared to the
sequential Kalman and another previously proposed optimum block
adaptive algorithms, the MGOBA algorithm achieves better error-rate
performance for block adaptive DFE of rapidly fading radio channels.
Index Terms—Adaptive filtering, block adaptive algorithm, decision-
feedback equalization, intersymbol interference, multipath fading chan-
nel.
I. INTRODUCTION
Radio channels are important communication links in modern
data transmission systems. Unlike telephone channels, whose im-
pulse responses are time-invariant or very slowly time-varying, radio
channels have randomly time-varying impulse responses caused by
several distinct independent propagation paths as well as continually
changing physical characteristics of the media [1]. Therefore, they
have been referred to as multipath fading channels.
Mitigation of intersymbol interference (ISI) from multipath fading
channels can be accomplished by decision-feedback equalization
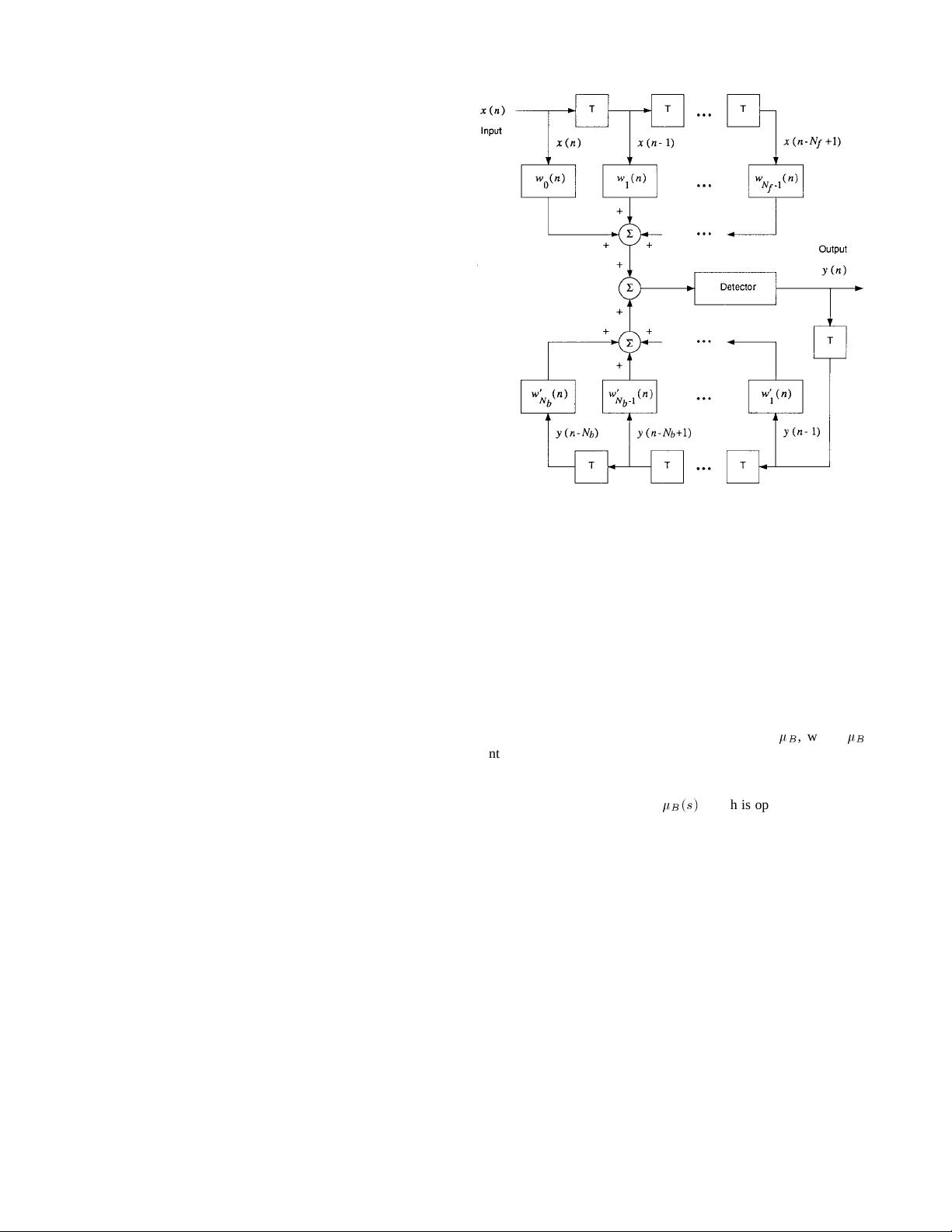
(DFE) [2]. Basically, a decision-feedback equalizer (also abbreviated
to DFE) consists of a feedforward filter, a feedback filter, and a
threshold detector as shown in Fig. 1. As compared to the maximum
likelihood sequence estimation (MLSE) technique [3], which is
optimum in the sense that the probability of a sequence error is
minimized, the DFE has much lower computational complexity and
could reach comparable performance on real recorded high frequency
(HF) channels [2]. A number of adaptive DFE methods have been
proposed for multipath fading channels, such as one-directional
equalization [4], bidirectional equalization [5], and block equalization
[6]. Among them, the one-directional and bidirectional approaches
involve the decision-directed mode where the DFE coefficients are
adjusted using the threshold detector’s output. One major problem
associated with the decision-directed mode is that it may cause
divergence of the corresponding adaptive DFE system when the
channel has fast time variations and/or a deep fade. In contrast, the
block adaptive DFE approach updates the DFE coefficients based
only on known training sequences and does not involve the decision-
directed mode; as a consequence, it avoids the serious divergence
problem and has much less average computational complexity.
To update the DFE coefficients of a block adaptive DFE system,
a sequential or block adaptive algorithm can be used. A sequential
Manuscript received June 13, 1995; revised December 11, 1996. This paper
was recommended by Associate Editor T. Hinamoto.
The authors are with the Department of Electrical Engineering, Na-
tional Tsing Hua University, Hsinchu, Taiwan 30043, R.O.C. (e-mail:
clwang@ee.nthu.edu.tw).
Publisher Item Identifier S 1057-7130(97)06585-3.
Fig. 1. The basic DFE structure.
adaptive algorithm adjusts the coefficients when a new input data
sample arrives, while a block adaptive algorithm adjusts them only
once every block of input data samples. The sequential Kalman
algorithm [7], [8] has been shown to be useful for DFE of multipath
fading channels. However, it was indicated in [9] and [10] that a block
adaptive algorithm usually provides better tracking performance than
a sequential one. This means that it is worth developing a good block
adaptive algorithm for block adaptive DFE systems.
Some block adaptive algorithms have been introduced in the
literature for adaptive finite impulse response (FIR) filtering. The
block least mean square (BLMS) algorithm in [9] is a stochastic
gradient algorithm with a fixed convergence factor
B
, where
B
controls the convergence speed, accuracy, and stability of the adaptive
system. Unlike the BLMS algorithm, the optimum block adaptive
(OBA) and the OBA shifting (OBAS) algorithms [11] employ a
time-varying convergence factor
B
(
s
)
which is optimized in a least
squares (LS) sense and updated at each block iteration. Although
these two algorithms converge at higher rates than the BLMS algo-
rithm to achieve the same convergence accuracy, their convergence
rates deteriorate when the adaptive filter order is high and/or the
input signal is colored (band-limited) [11]. This problem can be
solved by using the block fast transversal filters (BFTF) algorithm
in [12] or the optimum block adaptive algorithm with individual
adaptation of parameters (OBAI) in [13]. These two algorithms were
derived based on LS criteria, and they may be said to be equivalent
since their estimates of the Wiener solution are the same at each
block iteration. This can be checked by comparing (7) and (16) in
[12] with (19) and (29) in [13]. The BFTF and OBAI algorithms
achieve better convergence and faster tracking than the BLMS and
OBA/OBAS algorithms when the block length is greater than or
equal to the FIR filter coefficient number, but they do not work in
the opposite case [14]. In [14], a general optimum block adaptive
(GOBA) algorithm was proposed for adaptive FIR filtering. For this
1057–7130/97$10.00 1997 IEEE
Authorized licensed use limited to: HARBIN ENGINEERING UNIV LIBRARY. Downloaded on March 30, 2009 at 08:41 from IEEE Xplore. Restrictions apply.
下载后可阅读完整内容,剩余4页未读,立即下载
182 浏览量
257 浏览量
233 浏览量
506 浏览量
362 浏览量
124 浏览量
134 浏览量
2023-06-12 上传
2023-06-12 上传

xuehen2008
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- online Verilog-1995 Quick Reference Guide
- 学籍管理系统论文-概要设计说明书
- CDMA Technology Overview4
- 考研词汇复习:吴耀武核心词汇100篇
- linux系统常用命令sed使用手册
- Digital.Systems.Design.with.FPGAs.and.CPLDs
- C#程序设计基础教程
- VHDL.2008.Just.the.New.Stuff
- C#如何使用和连接数据库
- 使用数据绑定和DataSet.pdf
- The Verilog Golden Reference Guide
- ARM基础知识ARM处理器
- ARM Architecture Reference Manual.pdf
- CDMA信道编码及结构解析
- 中国电信计费模型_功能与流程
- 数据结构1800题及答案
