ROS机器人编程:SLAM、导航与感知详解
本资源是一份针对ROS(Robot Operating System,机器人操作系统)的深入教程,由胡春旭主讲,共分为九个部分,全面介绍了ROS机器人程序设计的关键技术。从ROS的现状与起源,到系统实现和核心组件,课程内容涵盖了从基础概念到高级应用的各个环节。
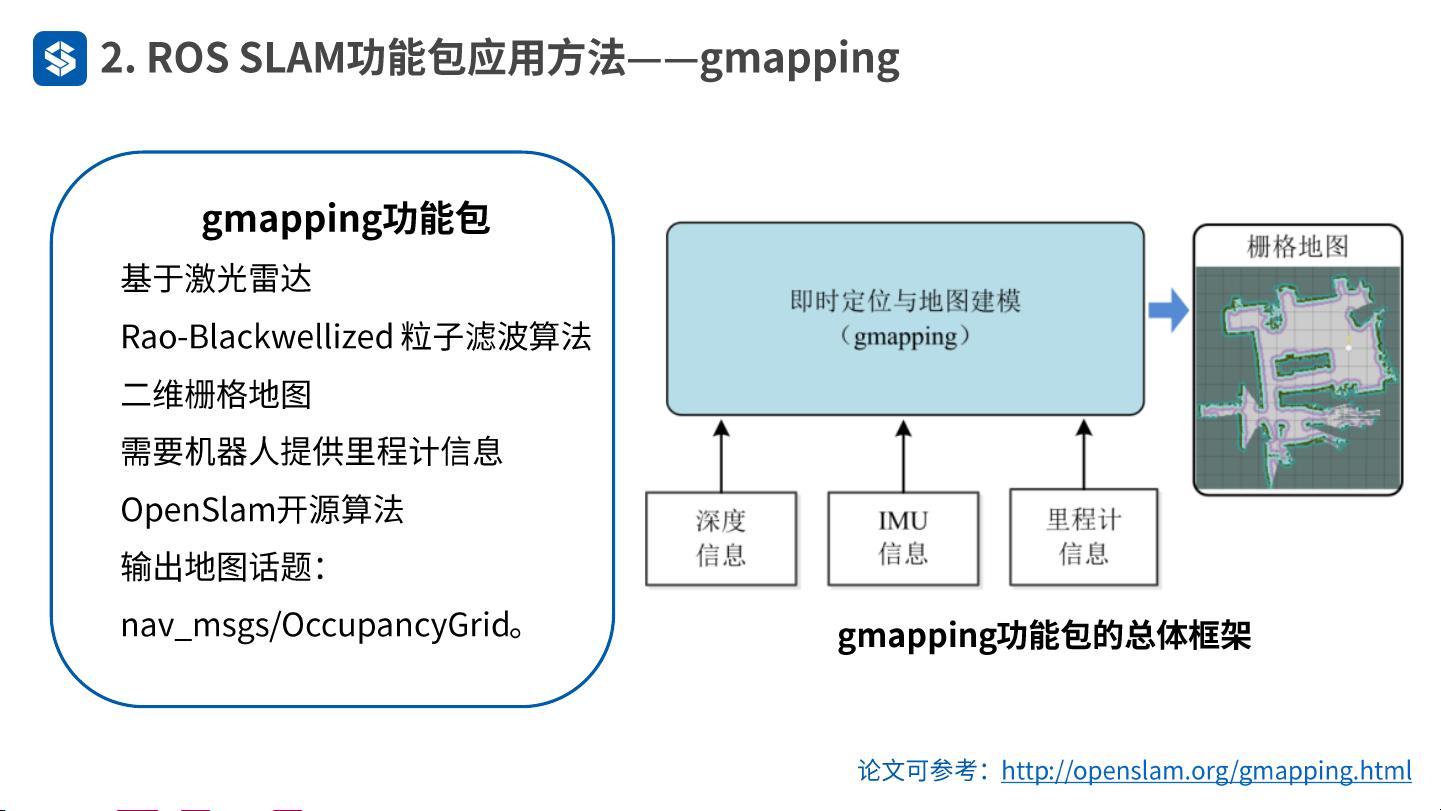
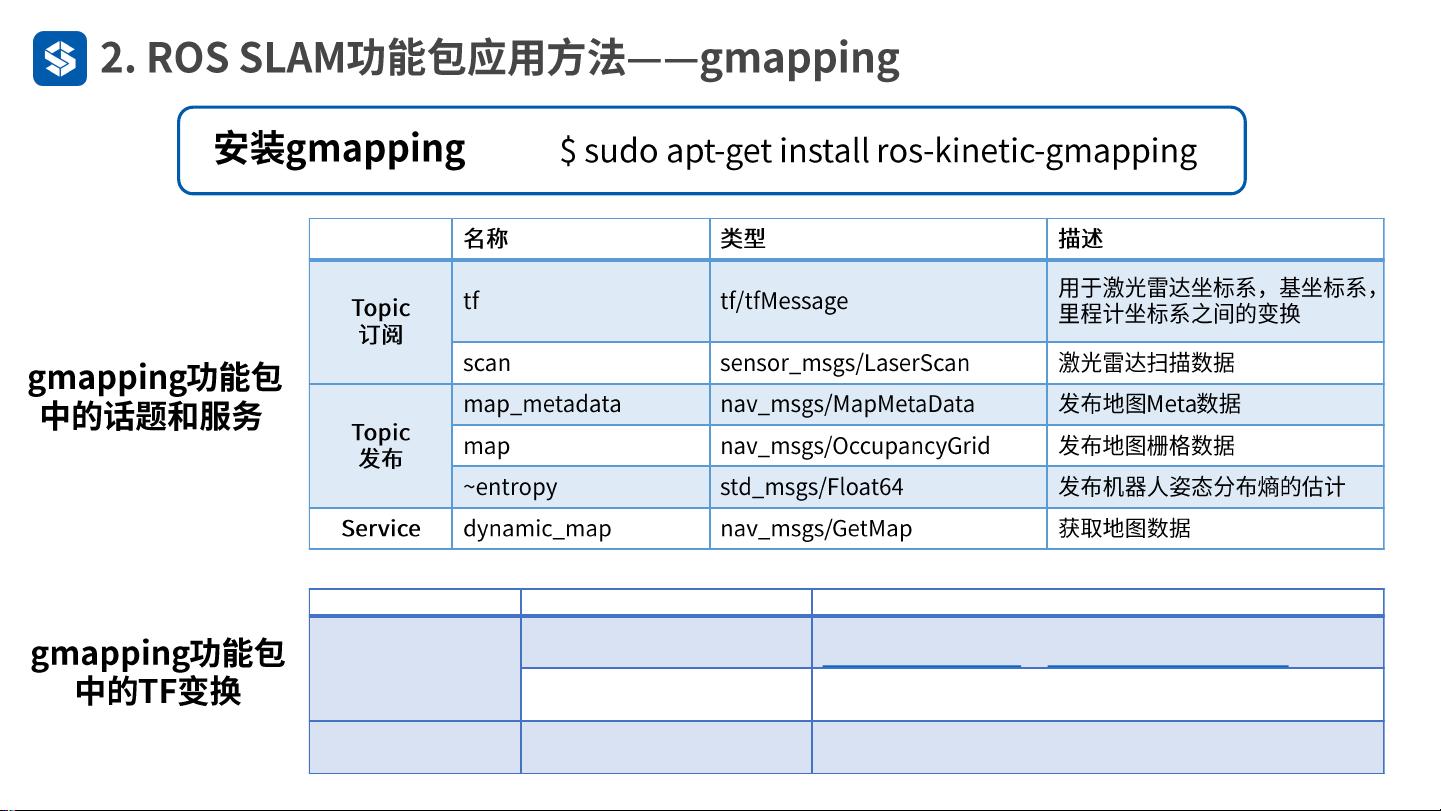
第六讲着重于机器人SLAM(Simultaneous Localization and Mapping,同时定位与地图构建)与自主导航,强调了机器人在导航中的必备条件,如激光雷达的深度信息获取、传感器的参数配置(如线速度、角速度测量范围、时间间隔等)。SLAM功能包在此部分得到深入探讨,包括如ORB-SLAM和LaserScan等,这些在ROS导航框架中扮演重要角色。
第五讲涉及机器人感知,讲解了激光雷达的数据结构,如数据帧的各个参数,如范围、角度、速度等,这些都是机器人感知环境中物体位置和距离的基础。机器人当前位置(pose)和运动状态(twist)的表示方法也被详细介绍,对于精确的机器人运动控制至关重要。
第七讲则深入到MoveIt!机械臂控制,这是一个用于规划和控制机器人手臂动作的库,课程讲解了MoveIt!的系统架构、模型创建和编程技巧,以及在Gazebo中的仿真应用。
随着课程的推进,第八讲转向ROS机器人综合应用,通过实例介绍PR2、Turtlebot、HRMRP、KungfuArm等常见机器人平台,展示了ROS在实际项目中的灵活运用。
第九讲聚焦于ROS2.0,解释了升级ROS版本的原因,比较ROS1与ROS2的差异,提供安装和编程指南,以及ROS2与ROS1的集成策略。
课程总结部分对整个学习过程进行了回顾,并对未来的技术发展趋势进行了展望。此外,还包含问题汇总和作业指导,帮助学员巩固所学知识并进行实践操作。
这门课程提供了丰富的实践经验和理论知识,适合希望深入理解和应用ROS的开发者、研究者以及对机器人技术感兴趣的人员。通过学习,学员将掌握ROS的核心概念、编程技巧以及如何在真实或模拟环境中实现自主导航和机械臂控制。

2018-09-28 上传
2017-03-14 上传
2024-01-28 上传
2023-07-27 上传
2015-10-09 上传

robotyujinmin
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
