AT89C51+DSP双CPU伺服控制器:提升数控系统性能
PDF格式 | 346KB |
更新于2024-09-01
| 45 浏览量 | 举报
"基于AT89C51+DSP的双CPU伺服控制器的研究"
本文探讨了在伺服控制器设计中采用AT89C51单片机与数字信号处理器(DSP)结合的方式,以提升系统的计算能力和实时处理性能。这种方式特别适用于需要多坐标轴控制、高速度和高精度的数控系统,能够解决单处理器系统面临的挑战。通过双CPU架构,系统能够实现更短的插补周期,从而提高进给和伺服控制的精确度。
在1引言部分,作者指出随着制造业的发展,对于运动控制器的性能要求越来越高。传统的8位单片机,如8051系列,虽然简化了开发流程,但在处理复杂运算和高精度控制时显得力不从心。因此,采用更强大的处理单元成为必然趋势。
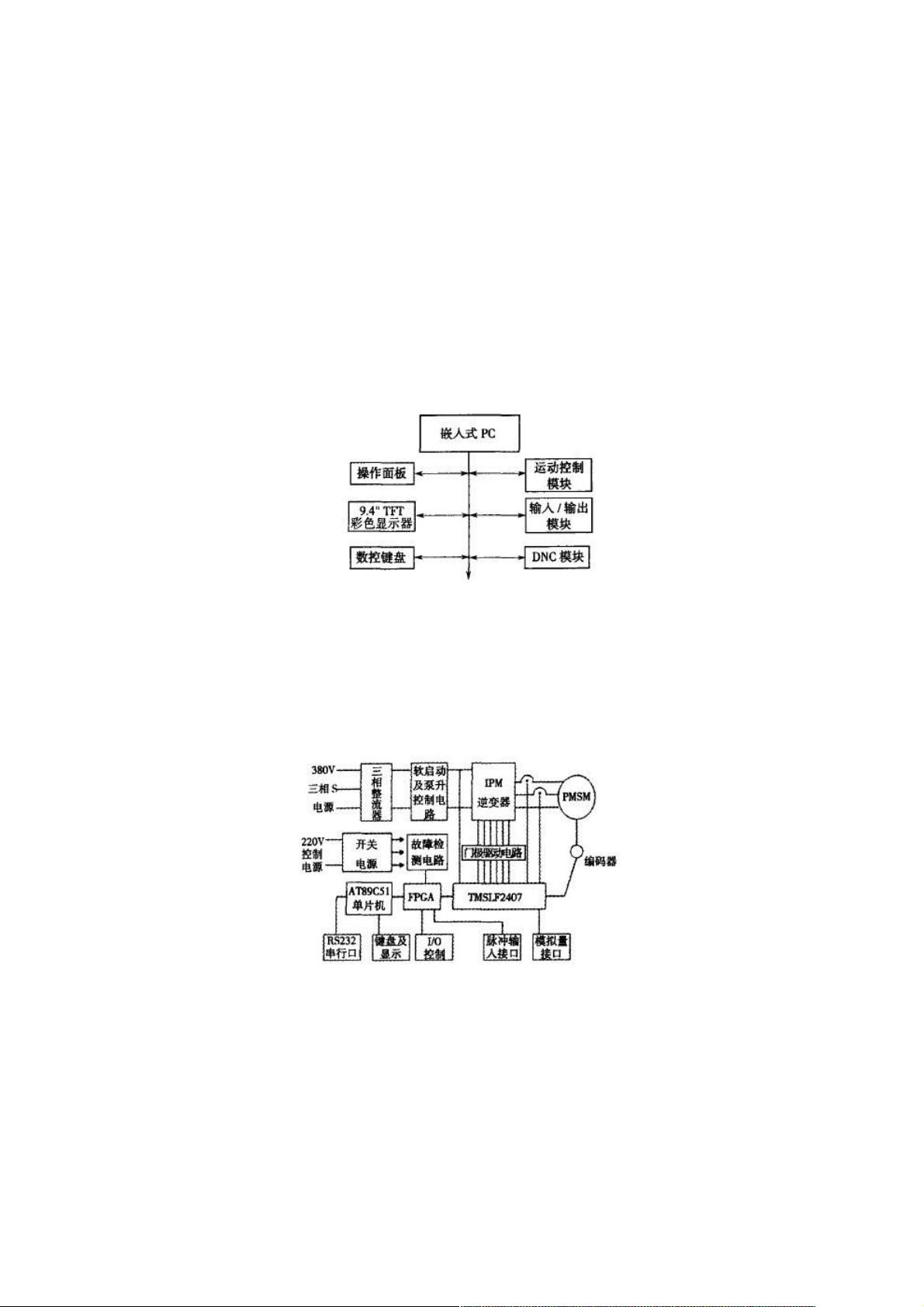
2HANUCCNC2000i系统部分介绍了HANUCCNC2000i数控系统的结构,包括嵌入式PC、操作面板、运动控制模块等组件。其中,嵌入式PC使用Intel80486处理器,内置32M缓存,确保了系统在加工过程中的高效性和精确性。缓存容量的增加有助于加快程序执行速度,并提高小线段插补的精度。DNC模块通过RS232接口与其他设备通信,增强了系统的开放性。
在核心的运动控制模块中,使用了TMSLF2407 DSP进行电流环、速度环控制以及SVPWM信号生成,负责高实时性的矢量控制和闭环控制。同时,AT89C51单片机处理相对低实时性的管理任务,如I/O接口、键盘、显示和串行通信。FPGA(现场可编程门阵列)作为这两者的桥梁,协调两者之间的数据交互。
3空间电压矢量脉宽调制原理部分,讨论了在全数字控制的交流伺服驱动系统中,如何通过数字脉宽调制(PWM)技术实现电压矢量控制,以优化电机性能,确保系统的动态响应和稳定性。
总结来说,这篇研究展示了基于AT89C51和DSP的双CPU伺服控制器设计,通过协同工作,提高了系统的处理能力和实时性能,实现了高精度、高速度的伺服控制,满足了现代制造业对运动控制的严格要求。该设计不仅提升了硬件的计算能力,还优化了软件处理流程,确保了系统的整体性能和可靠性。
基于基于AT89C51+DSP的双的双CPU伺服控制器的研究伺服控制器的研究
由于采用单片机与DSP配合,系统的运算和实时处理的能力大大增强,可以适应多坐标轴、高速度、高精确度的数
控系统,实现单处理器系统难以实现的功能. 与由单处理器完成所有任务的情况相比,该方法允许较短的插补周期,
实现更高的进给和伺服控制精确度. 并经实验证明该伺服运动控制器反向速度快、定位时间短、转矩恒定,具有良
好的线性调速特性及动态性能.
1 引 言 引 言
近年来,随着制造业的不断进步,现代制造业对精密化、精确化、高速化、自动化发展的要求越来越高,传统的运动控制器大
部分采用8051系列的8位单片机,这种单片机虽然节省了开发周期,但缺乏灵活性,且运算能力有限,难以胜任高要求运作设备[ 1 ] .
2 HANUC CNC2000 i系统系统
HANUC CNC2000 i系统控制框图如图1所示,系统主要包括嵌入式PC、操作面板、运动控制模块、彩显、输入/输出模
块、数控键盘、DNC模块几部分.为实现高速、高精确度曲面轮廓精加工,必须提高微段轮廓线的解释执行能力和伺服驱动特性,
为了保证零件程序的传送、插补、加减速控制等的连续处理, CNC应具备足够高的数据处理能力. 但普通的PC机在工业现场控
制中,存在体积大、功耗高、可靠性差等缺点. 基于这种情况, 嵌入式工业微机———PCl04总线模块应运而生.
图1 HANUC CNC2000i数控系统结构框图
本系统的嵌入式PC采用Intel80486处理器,内置32M缓存,MS - DOS操作系统. 与传统的工业PC相比,其32M缓存保证了数
控系统加工时的快速性和精确性. 因为,在加工的时候,缓存内的数据段直接和后续的译码程序相关联,所以缓存的容量越大,所存
储的程序越多,执行起来也越快,并且还能进行小线段插补,充分保证了加工的精确度. 与其相连的DNC模块可通过RS232接口与
上位机通信,使得整个系统具有良好的开放性.运动控制模块是本系统的核心,它以智能功率模块为开关器件,以
图2 交流伺服驱动系统结构图
TMSLF2407是用来实现电流环、速度环、SVP2WM信号发生、故障检测、保护、信号处理及实时性比较高的矢量控制和
闭环控制. 用单片机完成实时性要求比较低的管理任务,如I/O接口管理、键盘处理、显示、串行通讯等. FPGA 用于AT89C51与
3 空间电压矢量脉宽调制原理 空间电压矢量脉宽调制原理
在全数字控制的交流伺服驱动系统中,通常采用数字脉宽调制方法来代替传统的模拟脉宽调制.而在众多的脉宽调制技术中,
空间电压矢量是一种优化的PWM技术,能明显减小逆变器输出电流的谐波成分及电动机的谐波损耗,降低脉动转矩,且其控制简
单,数字化实现方便,电压利用率高,已有取代传统SPWM的趋势.
在本文中, Tk 和Tk+1分别为在逆变器相邻两个工作状态Vsk和Vsk+1下的导通时间,表示为
在一个完整的调制周期Ts 内, 除了Tk 和Tk+1的导通时间外, 其余为0 状态时间. 0 状态时间T0 由两个自由轮换状态时间T7
和T8 用等式表示为
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐




weixin_38693753
- 粉丝: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
