KV-5000/3000 PLC的电机定位控制详解
需积分: 3 138 浏览量
更新于2024-07-31
收藏 2.73MB PDF 举报
"KVSPOS 电机定位控制技术在KV-5000/3000系列PLC中的应用"
KVSPOS 电机定位控制是针对步进电机和伺服电机的一种高精度控制方法,主要应用于KV-5000/3000系列的可编程逻辑控制器(PLC)。这一技术确保了脉冲输出不受PLC扫描时间的影响,从而实现两轴(X/Y轴)的精确定位。
**定位控制技术规格**
- **参数存储**: 定位控制的参数存储在控制存储器(CM)中,可以通过编程灵活地更改33个以上定位点的数值。
- **控制轴数**: 提供2轴定位控制,即X轴和Y轴。
- **定位点数**: 共享32个定位点,适用于2轴。
- **位置指令范围**: 位置指令可以在-2147483648至2147483647的范围内设定,支持绝对和相对坐标。
- **速度指令**: 可以设置的速度范围为50至100000脉冲/秒(p/s)。
- **加减速时间**: 可以在0至4,000毫秒(ms)之间调整。
- **起动时间**: 极短的起动时间为30微秒(μs),保证快速响应。
- **脉冲输出形式**: 集电极开路输出,支持单脉冲和双脉冲切换。
- **专用指令**: 包括PLSX/PLSY(脉冲输出)、ORGX/ORGY(原点复归)、JOGX/JOGY(JOG运动)、TCHX/TCHY(示教)、HOMEX/HOMEY(起始位置移动)、CHGSPX/CHGSPY(运转速度更改)、RFSPSX/RFSPSY(当前值刷新)等。
**定位控制概念**
- 定位控制基于预设的目标坐标、起动速度、运行速度和加减速时间,形成梯形时序图,实现精准的点到点运动控制。
**定位控制步骤**
1. **参数设定**: 包括点参数和系统参数,通过控制继电器(CR)或控制存储器(CM)管理,并可通过编程改变。
2. **梯形图程序编制**: 使用专门的定位指令来编写控制程序。
3. **定位指令**: 了解并使用如PLSX/PLSY、ORGX/ORGY等指令来实现不同的控制功能。
4. **示例与一览**: 查阅“定位控制一览示例”、“定位用软元件/错误代码一览”等资料,理解控制流程和异常处理。
5. **速度更改**: 在运行过程中动态调整速度,参考“运转过程中的速度更改”和相关示例。
6. **超过32点的定位控制**: 学习如何在超出默认点数限制的情况下实现多点定位,参考“超过32点执行定位控制的示例”。
**电机定位控制的应用**
KVSPOS 电机定位控制在自动化设备、精密机械、机器人、半导体制造设备等领域有着广泛应用。它能够实现高速、高精度的运动控制,提高生产效率和产品质量。通过对PLC的编程,用户可以根据实际需求定制复杂的运动路径和控制策略,以满足各种工业自动化场景的需求。
2-166
2-12 电机 (定位)控制
电机 (定位)控制
2
CPU 内部功能
- KV-5000/3000 系列 PLC 用户手册 -
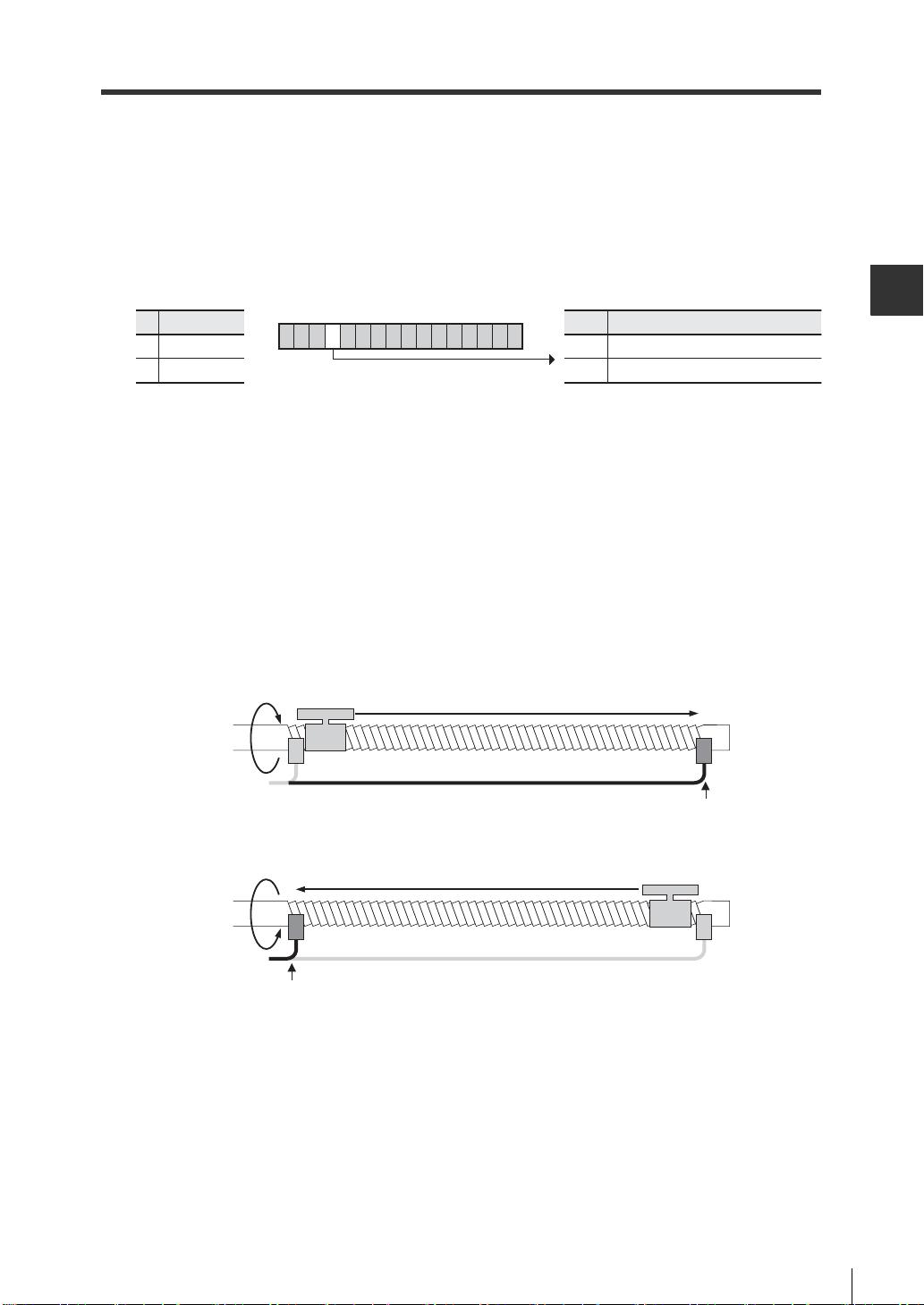
■ 原点传感器
“原点”是指用作定位控制基准的位置。原点传感器即为安装在轴上原点位置的传感器。
CR3002(CR3102) .... 将 CR3002(X 轴)和 CR3102(Y 轴)设定用于原点传感器控制。
R000 ~ R003 .......... 将输入继电器 R000~R003 设定用于原点传感器。
N.O./N.C. ............. 设定原点传感器输入的逻辑。
如果已设定 R000 ~ R003,则将预设输入作为原点传感器输入,进行原点复归。
如果使用 R000~R003 以外的其它继电器作为原点传感器输入,则请事先将这些参数设定为 CR3002
(CR3102),通过梯形图程序来 ON/OFF CR3002(CR3102)。
将输入继电器 R30000 用于 X 轴的原点传感
器输入。
参数存储位置 :参数被存储到 CM2000 和 CM2001。
CM2000 的设定 :“I/O 详细设定”第 2-209 页
CM2001 的设定 : “传感器使能详细”第 2-209 页
■ 停止传感器
运转过程中,移动物体一直移动到停止传感器的位置。当停止传感器 ON 时,移动物体将从该位置开始立
即减速、停止,或者再移动一定距离(停止传感器的规定脉冲数),然后再减速停止。
但是,如果在点参数中,“使用停止传感器的使用”设定为“不使用”,则可忽略停止传感器。
CR3003(CR3103) .... 将 CR3003(X 轴)、CR3103(Y 轴)作为停止传感器进行设定。
R000 ~ R003 .......... 将输入继电器 R000~R003 作为停止传感器进行设定。
N.O./N.C. ............. 设定停止传感器输入的逻辑。
如果已设定 R000 ~ R003,则将预设输入作为停止传感器输入,使移动停止。
如果使用 R000~R003 以外的其它继电器作为停止传感器输入,则请事先将这些参数设定为 CR3003
(CR3103),通过梯形图程序来 ON/OFF CR3003(CR3103)。
将输入继电器 R30001 用于 X 轴的停止传感
器输入。
参数存储位置 :参数被存储到 CM2000 和 CM2001。
CM2000 的设定 :“I/O 详细设定”第 2-209 页
CM2001 的设定 : “传感器起动详细”第 2-209 页
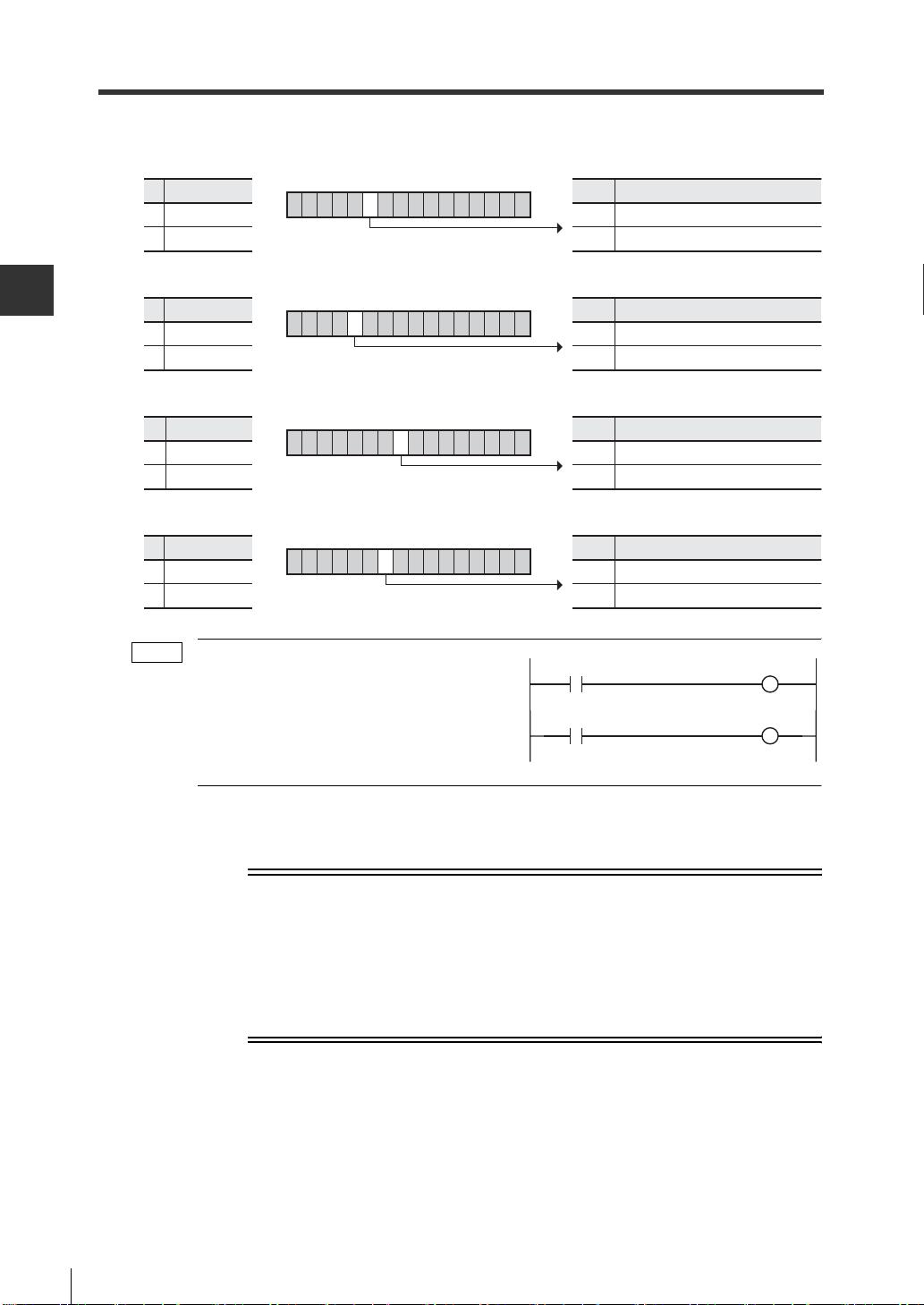
示例
R30000
CR3002
示例
R30001
CR3003
剩余56页未读,继续阅读
2024-12-01 上传
2024-12-01 上传
2024-12-01 上传
2024-12-01 上传
2024-12-01 上传
2024-12-01 上传
2024-12-01 上传
2024-12-01 上传
2024-12-01 上传

xhsplc88
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
