大滞后控制系统设计:模型构建与Smith预估补偿
版权申诉
"基于模型的滞后控制系统设计是一个典型的自动控制领域的课题,主要涉及过程控制、系统建模、控制算法设计以及MATLAB仿真。本设计旨在解决具有显著滞后特性的过程控制问题,通过预估补偿和内模控制策略提高系统的控制性能。
1. 系统建模:在温度控制中,滞后是常见的问题,尤其是当滞后时间和系统时间常数较大时。设计要求首先采用两点法或切线法建立一阶惯性控制模型。这一步骤包括收集系统数据,通过数学方法近似系统动态特性,确保模型曲线能够贴近原始数据曲线,以便于后续的仿真分析。
2. 控制算法与控制结构:基于建立的模型,设计控制系统。这可能包括传统的PID控制以及Smith预估补偿控制、内模控制等多种控制策略。通过MATLAB仿真,比较不同控制方案的性能,如超调、调节时间、稳定性等指标,以选择最佳控制算法。
3. 扰动分析与稳定性研究:设计系统主要扰动量,如模型不准确带来的影响,通过仿真来分析控制系统的稳定性。扰动分析对于评估系统对未知输入的鲁棒性至关重要,它能帮助理解系统在实际运行中可能遇到的问题及其对控制性能的影响。
4. PID控制:PID控制器是工业控制的基石,其工作原理是根据偏差e(设定值r与测量值y的差值)进行比例、积分和微分运算,以生成控制信号u。比例部分快速响应偏差,积分部分消除稳态误差,微分部分则有助于抑制系统的振荡。
5. 先进控制策略:在大滞后系统中,传统的PID控制可能不足以达到理想效果。Smith预估补偿器利用预估模型预测未来输出,提前调整控制信号,减少滞后影响。内模控制则基于对象的内部模型,实现对系统动态的精确补偿。
6. MATLAB仿真:作为强大的工具,MATLAB的Simulink环境可用于构建控制系统的仿真模型,对比不同控制策略的性能,并进行参数优化。通过仿真,学生可以深入理解各种控制算法在实际系统中的表现,提升理论知识与实践技能。
7. 课程设计报告:这份报告不仅涵盖了控制系统设计的理论与实践,还包含了对学生学习成果的评价,包括成绩、评语等,体现了教学过程的完整性和严谨性。
基于模型的滞后控制系统设计是一门综合性的课程,涵盖了控制系统的建模、算法设计、仿真验证以及稳定性分析等多个关键环节,是自动化专业学生掌握过程控制技术的重要实践项目。"
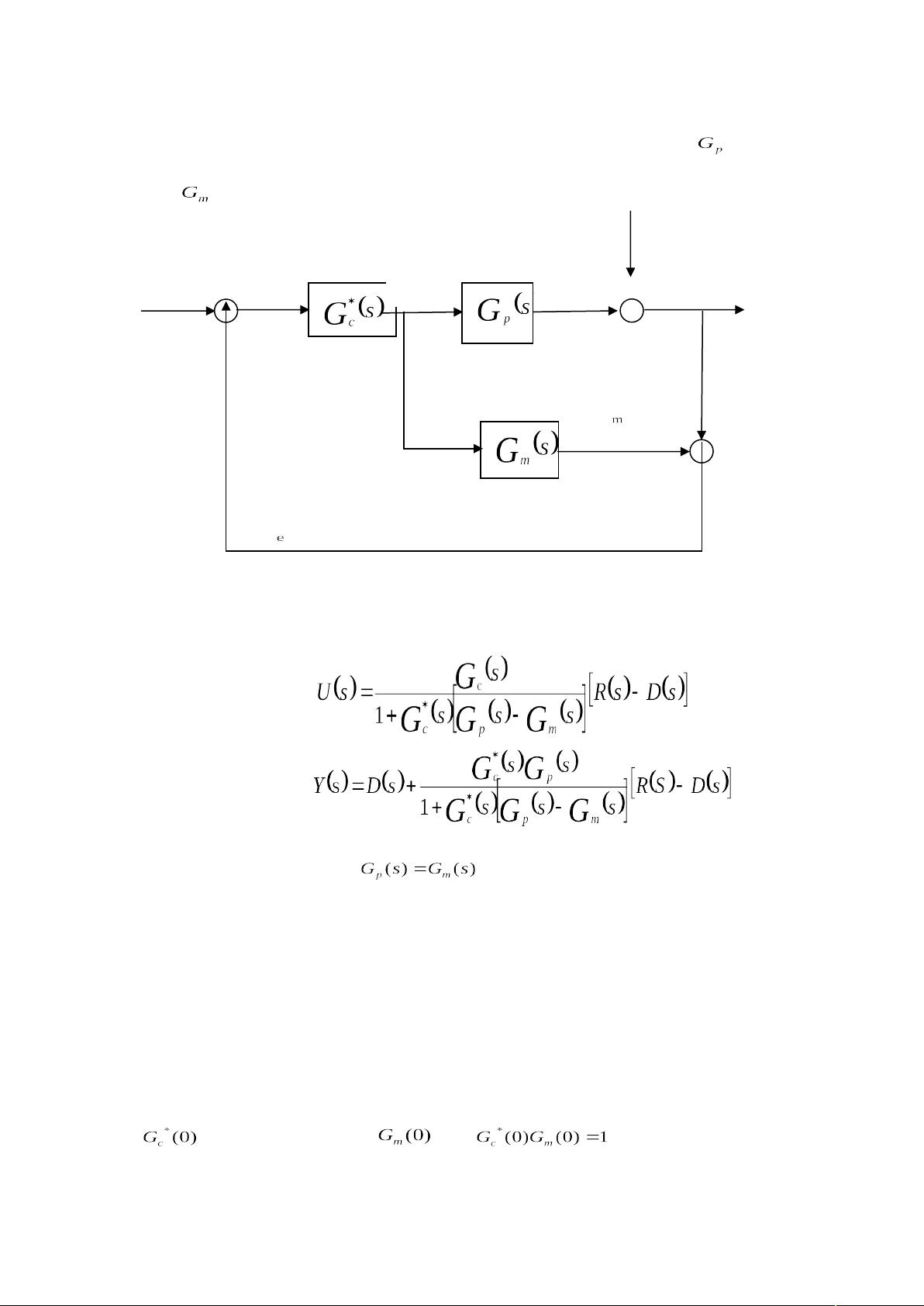
与常规反馈控制不同的是,内模控制器的被控对象为实际对象 与预估
模型 之差。当预估模型准确时,反馈信息直接反映了外部干扰的大小,而
内模控制器此时等效于前馈控制器,不仅如此内模控制器具有许多优秀性质。
图 2-2 内模反馈控制
由基本的内模控制结构图 ,可得到:
由式()、式(!)可得到内模控制的以下性质。
性质 (稳定性) 当 时,内模控制系统闭环稳定的充分条
件是控制器与过程本身均为稳定。由此可知,当模型精确时,内模控制系统的
闭环稳定性等价于开环稳定性,因而,与常规反馈控制相比,其稳定性分析非
常简单。
由性质 可知,内模控制不能直接应用于开环不稳定的被控过程。对于不
稳定的被控过程,可考虑先用常规反馈控制(如纯比例控制)使其成为稳定对
象,在应用内模控制;而对于开环稳定的被控过程,内模控制系统闭环稳定的
充分必要条件为控制器稳定。由于控制器完全由人工设计,因而,“控制器稳
定”这一要求很容易实现。
性质 (无余差性) 若被控过程 开环稳定,而且控制器的稳 态增益
与内部模型稳态增益 满足 ;则闭环控制系统对
设定值与外部扰动的阶跃变化均无调节余差。
(2-5)
( 2-
R
( s
)
U
(s
)
D
( s
)
+
+
+
-
Y(S)
Y (s)
D (s)
+
-
内模控制器
受控对象
内部模型
剩余24页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-07-10 上传
2023-07-05 上传
2021-09-01 上传
2010-03-09 上传
2020-08-12 上传
2018-10-14 上传

Usurk
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







