3D-Motif方法:工件磨痕三维表征与合并算法
需积分: 9 201 浏览量
更新于2024-08-11
收藏 1.16MB PDF 举报
本文主要探讨了一种创新的3D-Motif方法,用于精确表征工件磨痕的三维形貌特征。3D-Motif是一种在表面形态分析中广泛应用的技术,它能捕捉到表面的三维细节,如峰、谷、沟壑和脉络走向,相较于传统的二维评价方法,提供了更为全面的信息。论文的核心在于解决分水岭算法在获取初始三维粗糙度Motif时可能出现的过多无意义区域的问题。
作者提出了一种基于变化树概念的区域合并算法,这种算法在赵·J·斯科特的变化树理论基础上发展,通过动态邻接表策略,有效地合并了冗余的Motif区域。此外,文章引用了Barré的参数定义,对3D-Motif的深度、宽度、面积等关键参数进行了标准化,以形成一套新的3D-Motif评估体系。
通过白光相移干涉仪的测量数据,论文应用这一3D-Motif评估方法对磨痕表面进行了特征数据提取和详细分析。这种方法对于微机械工件的周期性润滑预防具有重要意义,因为它能够提供更为准确和可靠的表面状态数据,从而帮助工程师做出更好的维护决策,避免潜在的性能下降和故障发生。
该研究工作得到了航空科学基金的资助,作者黄长辉与其他研究人员合作,展示了他们在无损检测技术领域的专业知识,特别是在3D-Motif表征方法上的创新。他们针对Q235碳钢材料的磨粒磨损痕迹进行了实际案例研究,验证了3D-Motif方法在实际工程应用中的有效性。
这篇文章不仅介绍了3D-Motif方法的基本原理和改进算法,还强调了其在精密工程领域,尤其是在微机械工件表面检测中的重要价值,为提高产品质量和生产效率提供了有力的工具。
第 31卷 第 2期 四 川 兵 工 学 报 2010年 2
月
收稿日期:2009-11-29
基金项目:航空科学基金资助(20085656018).
作者简介:黄长辉(1985—),男,硕士研究生,主要从事白光显微干涉测量技术.
【制造技术】
一种 3D-Motif方法对工件磨痕
三维形貌的表征
黄长辉
1
,邹文栋
1
,颜乐先
1
,肖新元
2
(1.南昌航空大学 无损检测技术教育部重点实验室,南昌 330063;2.江西机电职业技术学院,南昌 330063)
摘要:论述了一种新的 3D-Motif方法,此方法是定义、基本表征参数与合并算法的结合.对于分水岭算法得到最
初三维粗糙度 Motif的合并问题,提出了一种基于变化树基础上的区域合并算法.利用该 3D-Motif评定方法对
白光相移干涉仪测量重建出的磨痕表面三维形貌进行特征数据提取及表征分析,用 Motif的深度、宽度、面积等 7
个参数对磨痕表面进行了参数表征及分析,这将对微机械工件周期润滑预防提供更可靠的数据依据.
关键词:3D-Motif方法;磨痕;区域合并算法;三维形貌
中图分类号:TG84 文献标识码:A 文章编号:1006-0707(2010)02-0086-04
随着现代科技与工业越来越向精密化发展,对材料表
面的评定要求也从以前的二维发展成现在的三维.Motif评
定方法的发展一样从二维走向三维
[1]
,3D-Motif评定方
法可直接描述形貌的峰、谷及其形成的沟、脉走向与分布
情况,这与只关注高度信息的传统表面评价方法形成鲜明
对比.由于目前学术界还没有统一的 3D-Motif评定体系,
各国科学家对 3D-Motif方法也进行了研究,研究提出的
3D-Motif的定义和合并方法各不相同
[2-5]
.对于采用分水
岭算法得到 的最初三维粗糙度 Motif出现的 过 多无 意义
Motif区域,本文中在 P.J.Scott提出的变化树概念
[6]
基础
上提出了一种基于阈值的动态邻接表区域合并算法,再结
合 Barré的参数定义
[4]
,给出了一套新的 3D-Motif评定体
系,并针对 Q235碳钢材料由磨粒磨损导致磨损痕迹进行
了实例分析.
1 3D-Motif表征法
3D-Motif定义是基于地貌学提出的,一个 3D-Motif
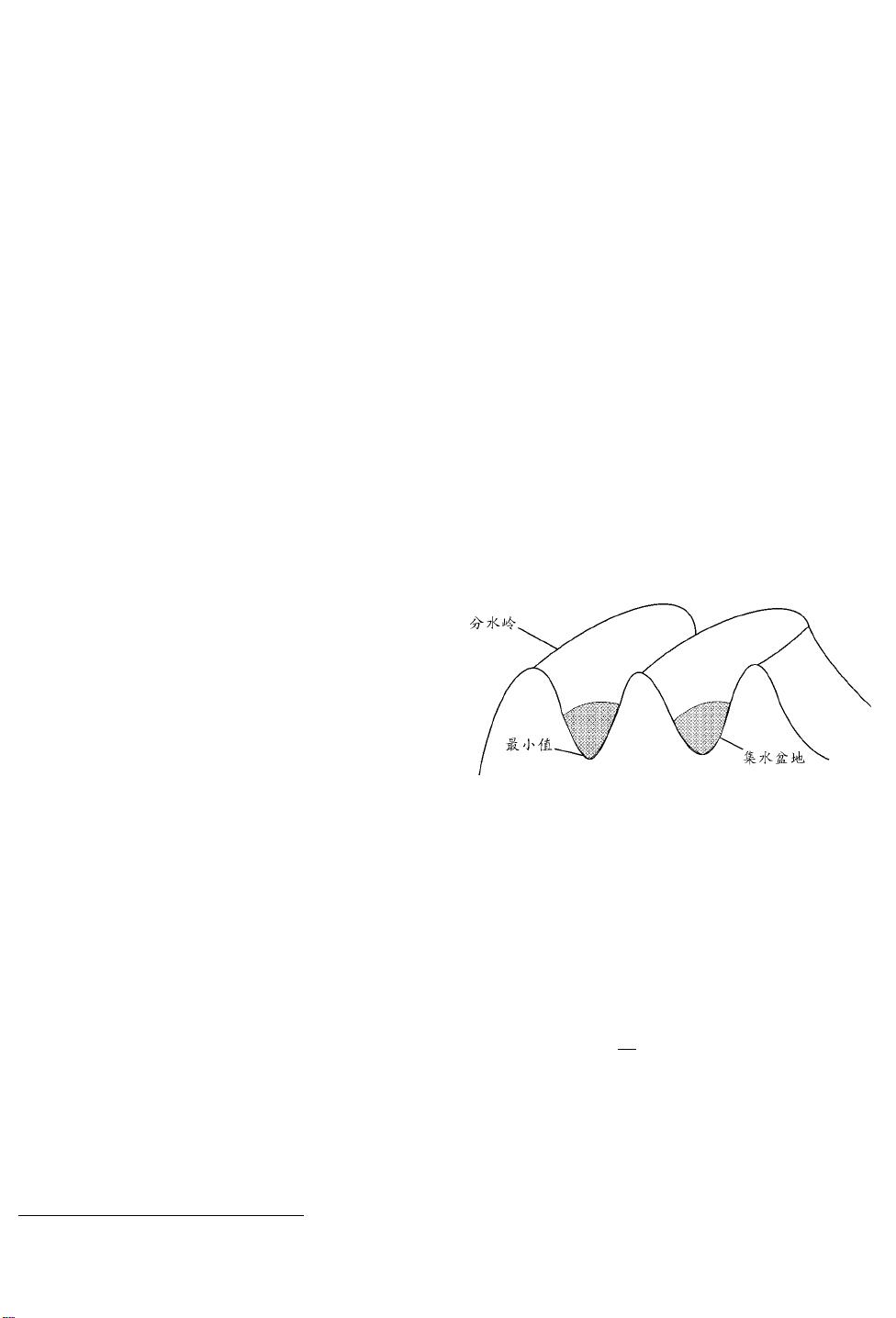
为由分水岭包围的集水盆.
1.1 分水岭算法
分水岭(Watershed)
[7]
比较经典的计算方法是 L.Vin
cent提出的.分水岭的描述如图 1所示.
此算法计算分水岭的过程可以通过模拟浸入过程来
说明.在每一个局部极小值表面,刺穿一个小孔,然后把整
个模型慢慢浸入水中,随着浸入的加深,每一个局部极小
值的影响域慢慢向外扩展,在 2个聚水盆汇合处构筑大坝,
即形成分水岭.
图 1 分水岭的形成
1.2 评价参数定义
本文中的参数定义采用 Barré的参数定义.Barré从二
维 Motif标准出发,给出了三维 Motif的特征化参数,Motif
集合的第 i个 Motif的参数为:
1)Motif的深度 h
i
,包围该 3维 Motif的分水线的平均
高度与最小高度的差;
2)Motif的面积 S
i
,P
i
=(x
i
,y
i
,z
i
),由分水线(P
1
,P
2
,
…,P
n
)所包围的一个 3维 Motif的面积
S
i
=
1
2
∑
n
j=1
x
j
(y
j+1
-y
j-1
) (1)
y
n+1
=y
1
,y
0
=y
n
(2)
3)Motif的宽度 W
i
在分水线平面上,沿垂直于 Motif
的主惯性轴方向所得的最大宽度;
4)Motif的长度 l
i
,在分水线平面上,沿平行于 Motif
下载后可阅读完整内容,剩余3页未读,立即下载
2021-06-26 上传
2021-07-17 上传
2019-08-06 上传
2021-05-26 上传
2018-04-26 上传
2021-07-07 上传









