多任务压缩感知在无线传感网络中的应用
需积分: 9 179 浏览量
更新于2024-07-25
收藏 2.38MB PDF 举报
"这篇论文是关于多任务压缩感知在无线传感网络中的应用,由Shihao Ji、David Dunson和Lawrence Carin撰写并发表在2009年1月的IEEE Transactions on Signal Processing期刊上。该研究探讨了如何利用压缩感知理论在资源有限的情况下高效地获取和恢复多个信号源的信息。"
在压缩感知(Compressive Sensing,CS)的框架下,系统通过N个非适应性测量来构建一个向量v,这个向量用于恢复一个近似信号^u,其原始信号u是一个M维稀疏向量。这里的N远小于M,即测量数量少于信号的维度,这得益于信号在某个M×M基矩阵下的稀疏特性。研究表明,通过合理设计压缩测量过程,可以实现对v到^u的逆变换,且误差ku-u^k2_2具有与最佳自适应变换编码算法相似的渐近性质。
大多数早期的研究中,如果存在L组以上的压缩测量数据fv_v_i (i=1;L),则每组对应的^u_u_i (i=1;L)会独立地逐一恢复。然而,这种方法忽视了不同任务间可能存在的相关性和潜在的协同效应。论文“Multitask Compressive Sensing”引入了多任务的概念,旨在同时处理和恢复多个信号,以提高整体恢复质量和效率。通过将多个信号的恢复问题融合为一个优化问题,可以利用各个任务间的共性信息,从而减少总的测量次数,降低计算复杂度,并可能提高恢复精度。
多任务压缩感知的核心是寻找一种方法,能够同时考虑所有信号的稀疏表示,并在测量过程中利用这些共享特征。这通常涉及到使用联合正则化或多元优化技术,例如`1范数正则化,它能有效地鼓励解决方案的稀疏性。通过这种方式,不仅可以减少传感器网络的通信负担,还能在保持重构质量的同时,提高资源利用率。
这篇论文在压缩感知领域提出了一种新的多任务处理方法,它挑战了传统的一次一任务恢复策略,强调了在无线传感网络中利用信号间的共性进行高效数据采集和恢复的重要性。这一理论和技术对于优化无线传感器网络的设计,特别是在资源受限的环境下,具有重要的理论价值和实际应用潜力。
94 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 57, NO. 1, JANUARY 2009
employed for the fast point estimate of the hyperparameters
and in Fig. 1. This yields a computationally efficient multi-
task CS inference algorithm that extends previous research in
the Bayesian CS analysis [10], wherein the Bayesian inversion
was performed one task at a time (single-task learning,
i.e.,
).
In addition to a hierarchal Bayesian model of multitask CS
and a fast inference algorithm, a modified sparse linear-regres-
sion model is developed, of interest both for the single-task and
multitask CS settings. As discussed further below, this extension
analytically integrates out the noise-variance term in the regres-
sion model, and it yields improved robustness over the previous
formulation.
The remainder of the paper is structured as follows. In
Section II we introduce a hierarchical Bayesian model for
multitask CS that builds naturally upon previous research
on Bayesian CS [10]; a fast sequential optimization algo-
rithm based on an empirical Bayesian procedure is developed
for inference. In Section III we propose a modified sparse
linear-regression model by marginalizing the noise variance,
and develop a fast inference algorithm as well. Example results
on multiple datasets are presented in Section IV. A review of
work related to multitask CS is provided in Section V, followed
in Section VI by conclusions and a discussion of future work.
II. H
IERARCHICAL MULTITASK
CS MODELING
A. Bayesian Regression Formulation
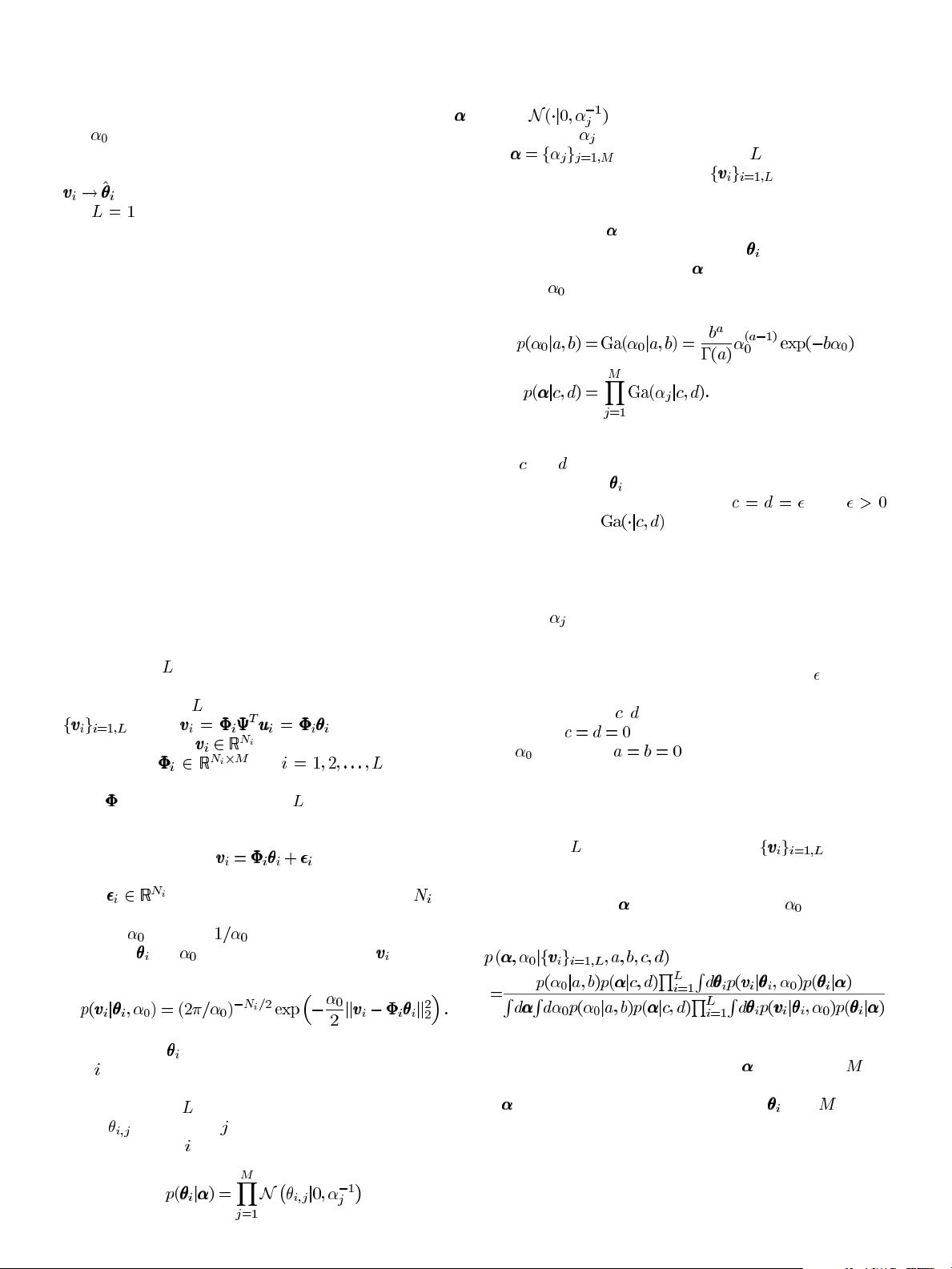
Assume that
sets of CS measurements are performed, with
these multiple sensing tasks statistically interrelated, as defined
precisely later. The
sets of measurements are represented as
, where , and in general each
measurement vector
employs a different random pro-
jection matrix
, for . This gener-
alizes the formulation considered in [12]–[15], [17], wherein a
single
is employed across all the tasks. In the context of a
regression analysis, we assume [10]
(2)
where
is a residual error vector, modeled as i.i.d.
draws of a zero-mean Gaussian random variable with unknown
precision
(variance ). The likelihood function for the
parameters
and , based on the observed data , may there-
fore be expressed as
(3)
The parameters
(here, wavelet coefficients) characteristic of
task
are assumed to be drawn from a product of zero-mean
Gaussian distributions that are shared by all tasks, and it is in
this sense that the
tasks are statistically related. Specifically,
letting
represent the th wavelet (or scaling function) coef-
ficient for CS task
,wehave
(4)
where
is a zero-mean Gaussian density function
with precision
. It is important to note that the hyperparame-
ters
are shared among all tasks, and therefore
the data from all CS measurements
will contribute to
learning the hyperparameters, offering the opportunity to adap-
tively borrow strength from the different measurements to a de-
gree controlled by
.
To promote sparsity over the weights
, Gamma priors are
placed on the hyperparameters
, and similarly on the noise
precision
(5)
(6)
It has been demonstrated [19] that appropriate choice of param-
eters
and encourages a sparse representation for the coeffi-
cients in the vector
, where here this concept is extended to a
multitask CS setting. Typically, when
, with
a small constant, has a large spike concentrated at
zero and a heavy right tail. The spike corresponds to basis func-
tions for which there is essentially no borrowing of information.
Such basis functions characterize components that are idiosyn-
cratic to specific signals. At the other extreme, basis functions
for which
is in the right tail have coefficients that are shrunk
strongly to zero for all tasks, favoring sparseness, while bor-
rowing information about which basis functions are not impor-
tant for any of the signals in the collection. For small
, there will
be many such basis functions. As a default choice which avoids
subjective choice of
, and leads to computational simplifica-
tions, we set
. For the Gamma prior on the noise preci-
sion
, we also let as a default choice. This choice
corresponds to a commonly-used improper prior expressing a
priori ignorance about plausible values for the residual preci-
sion.
2
With these parametric definitions, a graphical model rep-
resentation of multitask CS is illustrated in Fig. 1.
Given the
sets of CS measurements from the
(assumed) statistically related sources, by applying the Bayes’
rule, one may in principle infer a posterior density function on
the hyperparameters
and the noise precision
(7)
where the integral in (7) with respect to
is actually an -di-
mensional integral, with each integral linked to one component
of
; similarly, each integral with respect to is an -dimen-
sional integral, over all wavelet-coefficient weights. To avoid the
2
While the sparsity analysis provided here is largely following that of RVM
[19], which is intuitive and conceptual, a more recent and rigorous analysis of
sparse Bayesian learning and its superior performance on sparse representation
can be found at [37], [38]. More relevantly, it is the log-det term of the likelihood
(13) that produces sparsity.
剩余14页未读,继续阅读
2019-11-05 上传
2021-05-23 上传
2017-10-17 上传
2021-04-03 上传
2021-03-17 上传
2019-12-25 上传
2014-06-13 上传

ct607
- 粉丝: 2
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- small-calculator.zip_Windows编程_Visual_C++_
- book-js
- machine-learning:Java机器学习算法库
- 街机游戏项目
- CodePlayer:使用Html,Css和jQuery制作的项目。 CodePlayer是一种工具,可让您实时使用网络技术进行学习,实验和教学
- 人工智能深度学习flask服务框架.zip
- flume-http-handler:该项目适用于flume http源处理程序
- matlab人脸检测框脸代码-face-detected-opencv-nodejs:与libopencv4nodejs
- flutter-curves
- chap7.zip_VHDL/FPGA/Verilog_VHDL_
- news-extractor
- Export for Trello-crx插件
- cody:Weavora代码约定
- 项目:Primeiros passo com o projeto
- 人工智能大作业-Fashion数据集 分类.zip
- laravel_testoviy_zadaniye
