改进Fuzzy-PID飞行器姿态控制:模型优化与动态响应提升
190 浏览量
更新于2024-09-02
1
收藏 400KB PDF 举报
本文主要探讨了一种针对飞行器姿态控制问题的创新方法,即改进的Fuzzy-PID技术。飞行器在实际运行中面临着模型不精确、非线性特性、强耦合和随机干扰等挑战,这些因素可能导致控制精度和稳定性下降。因此,研究者提出了一种混合控制策略,结合了模糊控制(Fuzzy)与传统的比例-积分-微分(PID)控制。
Fuzzy-PID控制器的设计基于两部分:Fuzzy控制器和PID控制器。它利用误差(e)和误差变化率(ec)作为输入,输出则是系统控制量(u)。控制器的关键在于根据偏差的大小动态切换控制策略。当偏差较大时,采用Fuzzy控制,通过增强控制力度来快速减小误差,提升系统响应速度,避免过度振荡;当偏差较小,PID控制则负责减小稳态误差,优化静态性能,确保系统的长期稳定。
在Fuzzy控制器设计中,作者引入了自动修正因子n,这是一种在线调整机制,可以根据实时的系统状态动态调整模糊控制器的参数,增强了系统的自适应能力和抗干扰能力。这种调整策略使得控制器能够更好地应对飞行器在飞行过程中的不确定性。
模糊子集的选择和控制规则的制定基于经验和知识,旨在兼顾控制的效率和稳定性。模糊控制部分依据误差的大小选择合适的控制量,既能快速纠正误差,又避免了系统的不稳定行为。
通过数学仿真实验,结果显示这种改进的Fuzzy-PID控制方法显著提高了飞行器的姿态控制精度,减少了姿态角偏差,优化了系统的动态响应特性,从而增强了飞行器的自适应性和鲁棒性。这种方法对于复杂环境下飞行器的姿态控制具有重要的实践价值和理论意义。
一种改进一种改进Fuzzy-PID技术的飞行器姿态控制系统设计技术的飞行器姿态控制系统设计
为了克服飞行器模型不精确以及在飞行过程中各种随机因素带来的干扰,提高飞行器姿态控制精度和稳定性
能,提出了一种改进的Fuzzy-PID技术飞行器姿态控制系统,并进行数学仿真。根据姿态角大小决定采用Fuzzy
控制或PID控制。同时,在Fuzzy控制器中引入自动修正因子n对模糊控制器的参数进行在线修改,增强参数在线
自调整能力。实验仿真结果表明该方法能够迅速减小姿态角偏差,改善系统的动态响应特性,提高飞行器自适
应能力。
0 引言引言
飞行器在大气层内的运动具有非线性、强耦合、不确定等特性,难以建立精确的数学模型,并且易受风干扰等随机干扰的
影响,气动参数变化剧烈。因此,设计一个可靠的
因此,本文将PID控制和Fuzzy控制结合起来应用在飞行器姿态控制系统中。Fuzzy控制是一种仿人思维的智能控制方法,
不依赖于精确的数学模型,可以较好地解决由于飞行器模型不精确和随机干扰引起的控制问题。但Fuzzy控制很难解决系统本
身存在的稳态误差,PID控制正好能够弥补这一不足。同时,为了改善Fuzzy控制器的性能,加入自动
1 Fuzzy-PID控制器设计控制器设计
1.1 总体设计总体设计
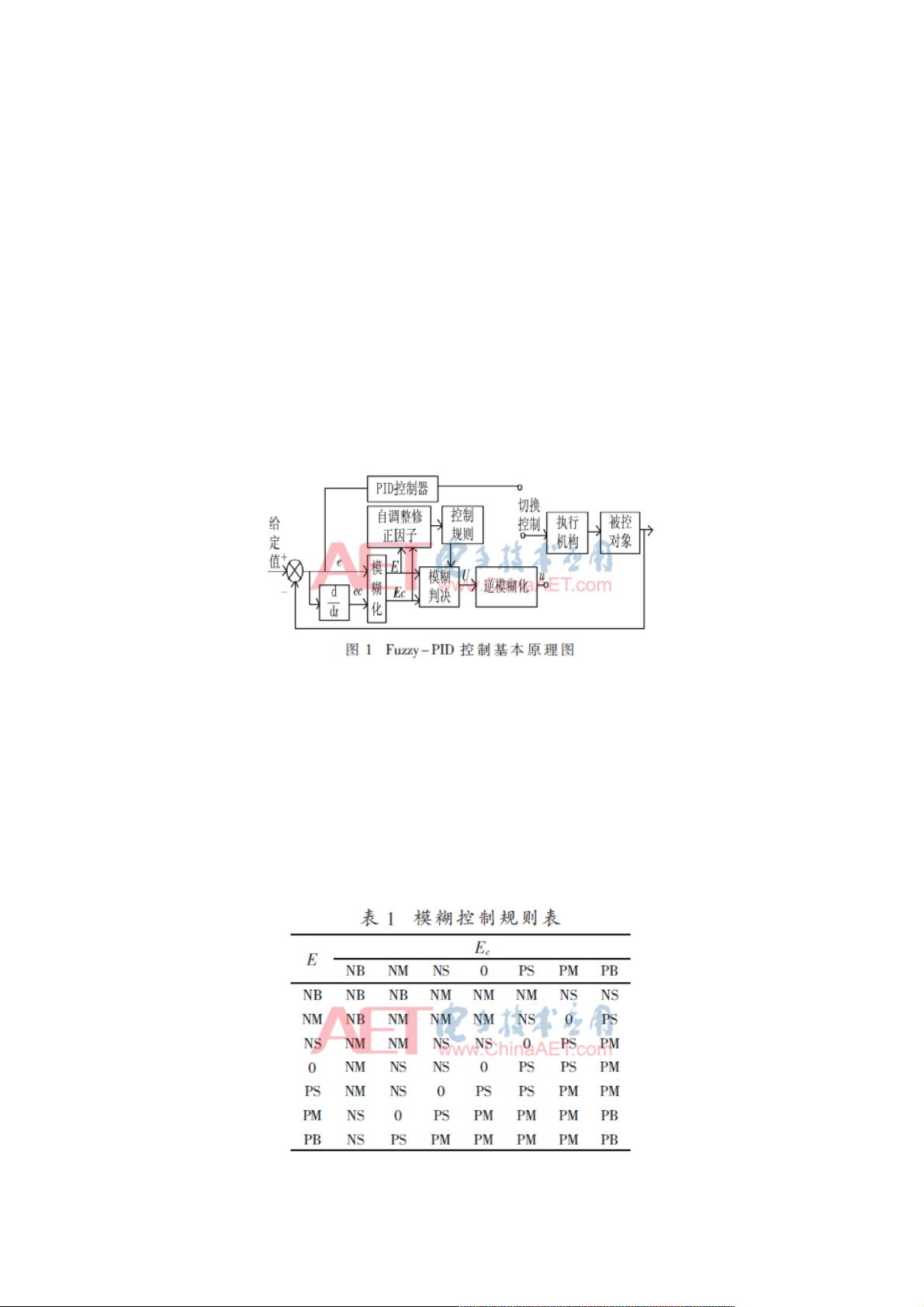
Fuzzy-PID控制的基本原理如图1所示。
控制系统由两部分组成:Fuzzy控制器和PID控制器。选取误差和误差变化率作为系统输入,输出为系统控制量u。控制系
统根据偏差e的大小来决定采用何种控制算法。当误差过大或较大时,采用Fuzzy控制算法,加大控制作用抑制超调,提高系
统的响应速度,使系统实际响应尽快达到给定值;反之,采用PID控制算法,减小系统稳态误差,改善静态特性。它比单独
Fuzzy控制或者PID控制都有更好的控制性能。PID控制器的设计在本文不再赘述。
1.2 带自动修正因子的带自动修正因子的Fuzzy控制器设计控制器设计
在设计Fuzzy控制器的过程中,主要分为5个部分
[1]
:(1)确定
设输入量e、e
c
和输出量u的论域分别为E、E
C
和U,其模糊子集通常用{负大(NB),负中(NM),负小(NS),零(0),正小
(PS),正中(PM),正大(PB)}来表示。选取控制量的一般原则是:当误差大或较大时,选取控制量以尽快消除误差为主;当误
差较小时,选择控制量要以系统的稳定性为主,防止系统超调。根据知识经验加以总结得到模糊控制器的控制规则,见表1。
设偏差e和偏差变化率e
c
的量化因子分别为K
1
和K
2
,控制量U的比例因子为K
3
,它们在很大程度上影响模糊控制器的性能。
K
1
越大,系统的超调量越大,过渡过程也越长;反之,则系统变化越慢,稳态精度降低。K
2
越大,系统超调量越小,输出变
化率越小,但系统变化越慢;反之,则系统反应加快,但超调增大。K
3
主要影响系统的动态性能,与实际控制对象有关。
下载后可阅读完整内容,剩余4页未读,立即下载
2021-06-27 上传
2021-08-08 上传
2021-05-01 上传
2021-02-08 上传
2023-08-05 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38513665
- 粉丝: 5
- 资源: 936
 我的内容管理
展开
我的内容管理
展开







