CANoe入门教程:配置CAN总线网络与信号定义
版权申诉
78 浏览量
更新于2024-07-06
收藏 3.82MB DOCX 举报
"超经典CANoe工程案例.docx"
CANoe是一款由Vector公司开发的专业汽车电子系统总线分析工具,广泛应用于汽车电子行业的通信测试和诊断。该文档主要介绍了使用CANoe进行基础应用的步骤,以CANoe 7.6版本为例。硬件设备采用了CANcaseXL,它支持高速CAN (251)、LIN (7269) 和低速/容错CAN (1054)。
首先,CANoe的安装包括驱动程序和软件的安装,安装完成后通过Vector Hardware控制面板检查硬件连接。CANcaseXL的两个piggy模块可以灵活组合以支持两路通讯。
接着,启动CANoe软件并新建工程。选择"File->New Configuration",然后选用CAN_500kBaud.tcn模板,创建一个波特率为500Kbps的CAN工程,并保存配置。
在工程创建后,需要使用CANdb++Editor来定义总线网络、消息和信号。CANdb++Editor是CANoe中的一个重要工具,用于编辑数据库文件(DBC)。通过"File->CreateDatabase"选择CANTemplate.dbc模板创建一个新的DBC文件。
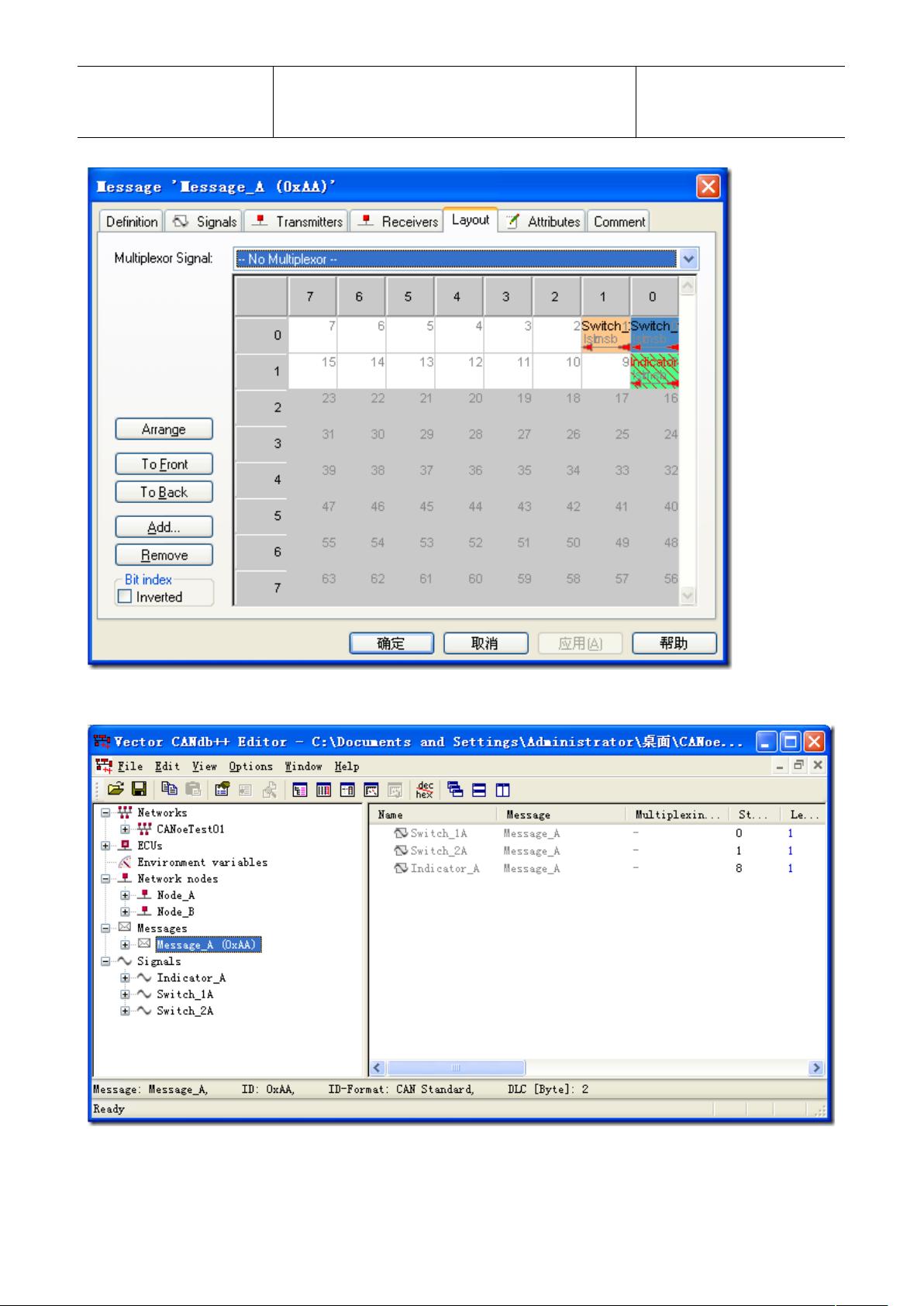
在CANdb++Editor中,首先定义网络节点。右键点击"Networknodes",选择"New",分别创建Node_A和Node_B。之后,创建CAN消息,指定其名称、ID和数据长度代码(DLC)。同时,定义消息的发送节点,可以手动添加或通过拖曳方式将消息关联到特定节点。
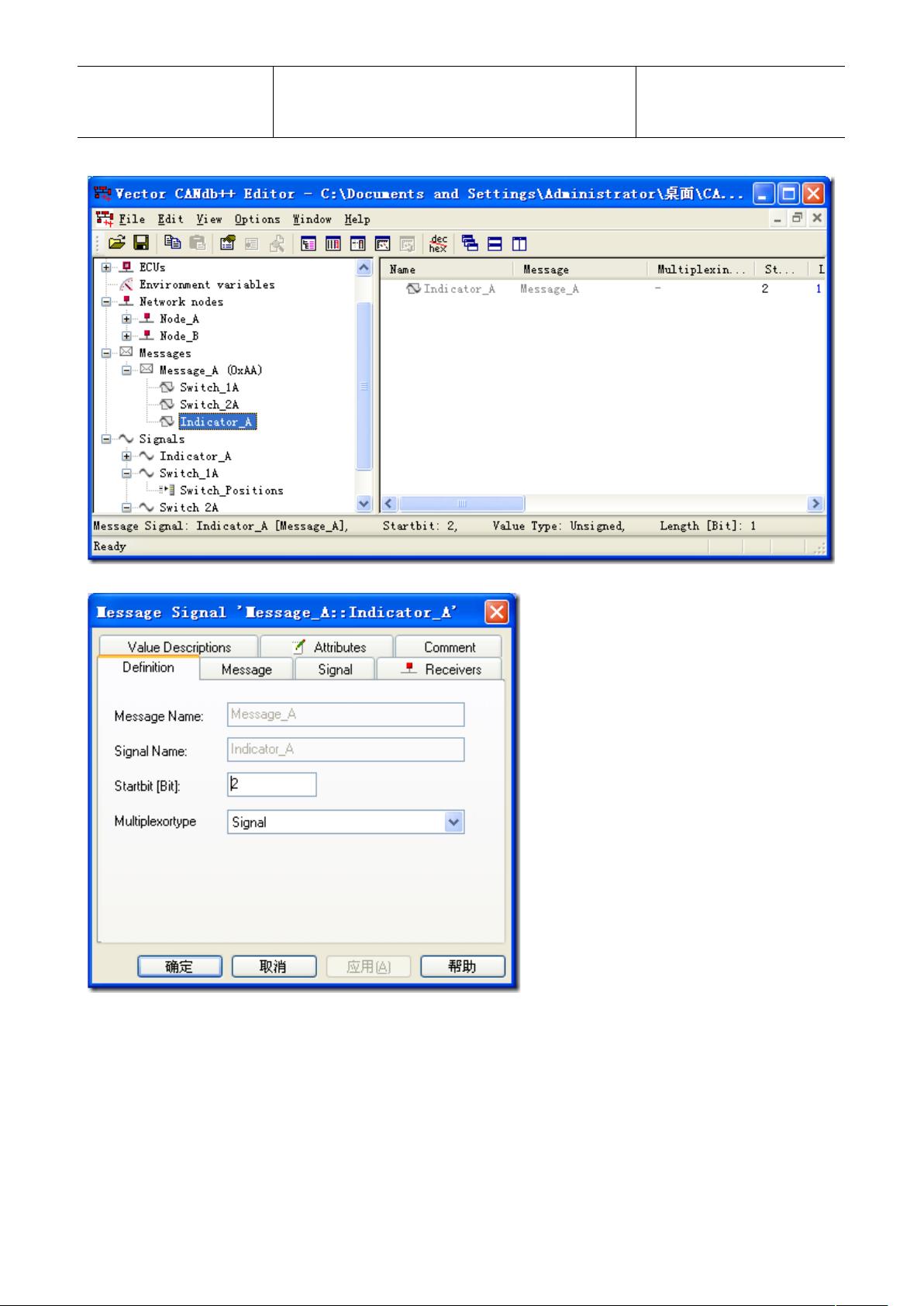
信号的创建是通过"Right-click Signals->New"完成的,需要填写信号名称等相关信息。创建的信号需要与之前定义的消息关联,这同样可以通过手动添加或拖曳操作实现。信号格式有Intel模式和Motorola模式之分,它们在二进制表示上有所不同,Intel模式从低位到高位存储,而Motorola模式则相反。
这个超经典的CANoe工程案例详细地展示了如何从零开始建立一个CAN网络配置,包括硬件连接、软件配置、网络节点定义、消息创建以及信号的管理。这对于理解和实践CANoe在汽车电子系统中的应用具有很高的参考价值。
剩余44页未读,继续阅读
2021-09-30 上传
225 浏览量
148 浏览量
2021-09-14 上传
2023-03-26 上传
2019-06-11 上传
2022-06-11 上传
2022-07-13 上传
200 浏览量

m0_63742033
- 粉丝: 0
- 资源: 7万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
