舵机控制技术解析:PWM信号与调速算法
需积分: 48 11 浏览量
更新于2024-07-29
1
收藏 346KB PDF 举报
“舵机控制基本原理(易于理解)”
舵机控制技术在各种智能车辆竞赛中扮演着关键角色,特别是对于参与飞思卡尔智能车大赛的同学们来说,理解这一技术至关重要。舵机是一种广泛应用的微型伺服机构,主要用于精确控制机械装置的角度位置。本文将深入探讨舵机的工作原理,尤其是PWM信号的使用以及如何通过算法来控制单个或多个舵机。
一、舵机PWM信号介绍
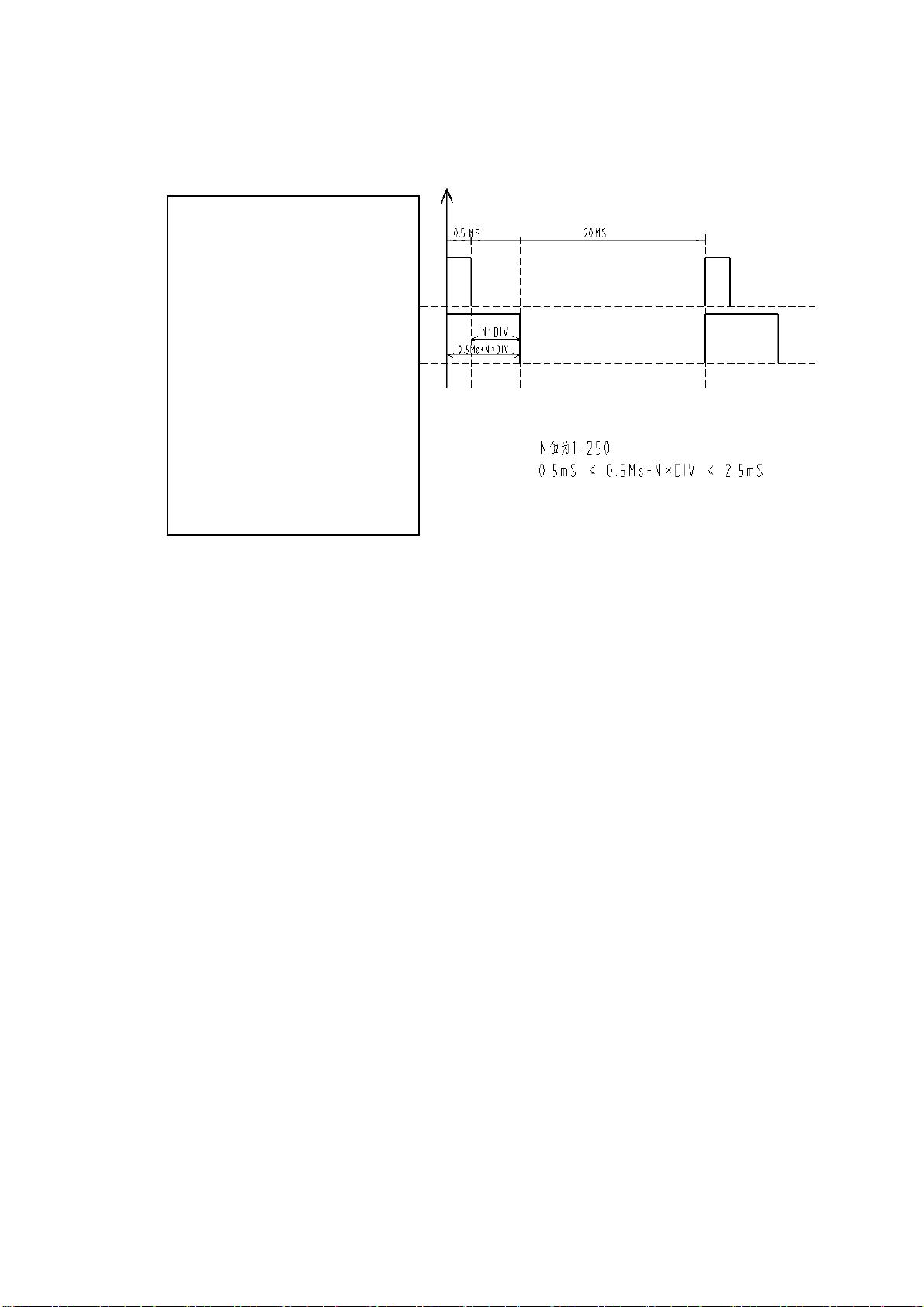
1. PWM信号的定义:PWM(Pulse Width Modulation)是脉冲宽度调制信号,其特征在于脉冲的上升沿和下降沿之间的持续时间。在舵机应用中,PWM信号的周期通常为20毫秒,而脉冲宽度的变化范围在0.5毫秒到2.5毫秒之间,这个变化决定了舵机转动的角度。
2. PWM信号控制精度:舵机根据接收到的PWM脉冲宽度调整其转角,脉冲宽度越宽,舵机转动的角度越大。例如, HG14-M舵机遵循传统的PWM协议,它的角度范围通常在0度到185度之间,通过调整脉冲宽度来精确控制舵机的转动位置。
二、单舵机拖动及调速算法
1. 舵机的位置控制:HG14-M舵机作为随动机构,通过发送特定宽度的PWM脉冲,可以使其停留在指定的角度。
2. 目标规划系统:舵机具有追随特性,能够根据输入的PWM信号实时调整角度,实现位置跟踪。为了测量和计算舵机的转动速度(ω值),可以通过双摆试验进行验证。
三、单舵机调速算法
1. 极限下降沿PWM脉宽:舵机转动时,其速度受下降沿PWM脉宽的影响。通过调整这个脉宽,可以控制舵机的转动速度,实现快速或慢速转动。
四、8舵机联动单周期PWM指令算法
1. 控制要求:在多舵机联动中,需要确保每个舵机同时接收并执行指令,保持同步。
2. 注意事项:处理多个PWM信号时,需要避免信号间的干扰,确保每个舵机的响应时间一致。
3. PWM信号发生算法:通过特定的算法生成8路同步的PWM信号,确保所有舵机在同一时刻开始转动。
4. N排序子程序RAM的制定:为了实现同步,可能需要设计内存结构来存储和处理多个舵机的指令。
5. N差子程序解析:这种子程序用于处理不同舵机之间的差异,确保它们在执行过程中保持一致。
6. 扫尾问题:在舵机完成动作后,可能存在微小的位移,扫尾算法就是用来解决这个问题,通过计算扫尾值并进行补偿,使舵机精确停在目标位置。
总结,舵机控制的核心在于理解PWM信号的作用和如何通过算法精确控制舵机的运动。对于参赛者而言,掌握这些基础知识将有助于他们在比赛中设计出更高效、更精准的控制系统。
2 / 15
2
2
22
2.
..
.PWM
PWMPWM
PWM 信号控制精度制定
信号控制精度制定信号控制精度制定
信号控制精度制定
1 DIV = 8uS ; 250DIV=2mS
时基寄存器内的数值为:(#01H)01 ----(#0FAH)250。
共 185 度,分为 250 个位置,每个位置叫 1DIV。
则:185÷250 = 0.74 度 / DIV
PWM 上升沿函数: 0.5mS + N×DIV
0uS ≤ N×DIV ≤ 2mS
0.5mS ≤ 0.5Ms+N×DIV ≤ 2.5mS
图
图图
图 1
11
1-
--
-2
22
2
我 们 采 用 的 是 8 位
AT89C52CPU,其数据分辨率为
256,那么经过舵机极限参数实
验,得到应该将其划分为 250 份。
那么 0.5mS---2.5Ms 的宽度
为 2mS = 2000uS。
2000uS÷250=8uS
则:PWM
PWMPWM
PWM 的控制精度为
的控制精度为的控制精度为
的控制精度为 8us
8us8us
8us
我们可以以 8uS 为单位递增
控制舵机转动与定位。
舵机可以转动 185 度,那么
185 度÷250=0.74 度,
则:舵机的控制精度为
舵机的控制精度为舵机的控制精度为
舵机的控制精度为 0.74
0.740.74
0.74 度
度度
度
剩余14页未读,继续阅读
2020-11-12 上传
2012-07-18 上传
2016-04-18 上传
2014-08-20 上传
2012-04-29 上传
2012-11-13 上传

xd1909
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- StickyMayhem
- Face-Tracker-Haar-Kanade:使用Lucas-Kanade和Haar Cascade算法即使在数据集有限的情况下也可以跟踪人脸
- dodgeballs:躲开球!
- 女性美容养生护理手机网站模板
- template-cpanel-adminiziolite:模板 CPanel Adminiziolite
- raw-connect:具有Polkadot JS WasmProvider实现的基板Wasm客户端的原始模板
- 基于三菱PLC程序的花样喷泉控制程序.zip
- Yoda-to-sl:尤达告诉你怎么走!
- soko-city:崇光市
- 防京东商城手机网站模板
- Awesome-Trajectory-Prediction
- 易语言-易语言简单的多线程例子
- 模板-tmp7
- 间歇交替输出PLC程序.rar
- ecommerce-bikeshop:一个电子商务网络应用程序,受在线自行车商店网站的启发,让您使用Google身份验证创建帐户,添加购物车中的商品,使用Stripe进行付款等等
- django-dropboxchooser-field:Django的Dropbox选择器字段
