ARM11驱动的智能垃圾桶:语音操控与精确导航
6 浏览量
更新于2024-09-03
1
收藏 414KB PDF 举报
本文主要探讨了基于ARM11架构的家用智能垃圾桶的设计与实现,着重关注于提升垃圾处理过程中的便利性和人性化。这款智能垃圾桶的核心技术应用了S3C6410处理器,它具备语音识别和声源定位功能,能有效响应主人的语音指令。
系统硬件设计由垃圾桶车体机械结构和硬件控制电路两大部分组成。机械结构采用三轮小车设计,能根据用户的声音指令自主导航到指定位置,确保用户在需要丢弃垃圾时的轻松体验。硬件控制电路则包含了电源管理、ARM最小系统、声源定位模块、语音识别模块、避障模块和电机驱动模块。
电源模块采用锂电池供电,通过LM2576S-5稳压芯片稳定电压,为各个模块提供所需的5V。语音芯片UDA1341TS、拾音器、红外避障设备和直流电动机均采用相同的供电方式。声源定位模块利用两个拾音器组成的麦克风阵列,通过信号调理单元预处理,确保在嘈杂环境中也能准确捕捉声音信号,并通过两级放大电路增强信号强度,避免负电压问题影响ARM的采样精度。
语音识别模块是关键部分,采用了Philips公司的UDA1341TS芯片,它负责语音信号的接收、放大、滤波和采样,实现对用户指令的精确识别。此外,设计还允许用户通过语音控制垃圾桶的移动方向(前后左右)以及开闭垃圾桶盖等操作,增加了使用的灵活性。
整体来说,这款基于ARM11的智能垃圾桶不仅实现了基本的垃圾分类存储,还通过智能化技术解决家庭垃圾处理中的实际问题,特别适合老年人、孕妇或行动不便者的日常需求。通过试验证明,该设计在性能上达到了预期,充分体现了科技如何提升生活质量的理念。
基于基于ARM11的家用智能垃圾桶的设计与实现的家用智能垃圾桶的设计与实现
设计的智能垃圾桶“听”到主人的呼喊后能自动到达主人身边,并且能识别主人的声音进行一系列动作,经试验证
明该设计能够满足使用要求。
随着人们生活水品的不断提高,在人们购买各种家具或家电时越来越重视其智能化和人性化。人们在生活中产生的生活垃圾都
需用垃 圾桶放置,考虑到老人、孕妇或者残疾人,放置垃圾时存在的不便、费时、费力等问题。设计针对这些问题,提出了
具有语音识别功能的智能垃圾桶设计方案,当用 户想要扔垃圾时,只要一声令下,垃圾桶就会快速准确地来到你身边。
1 系统硬件设计
系统硬件包括垃圾桶车体机械结构和硬件控制电路两个部分。其中车体机械结构为一部三轮小车车体,能按照在不同地点处用
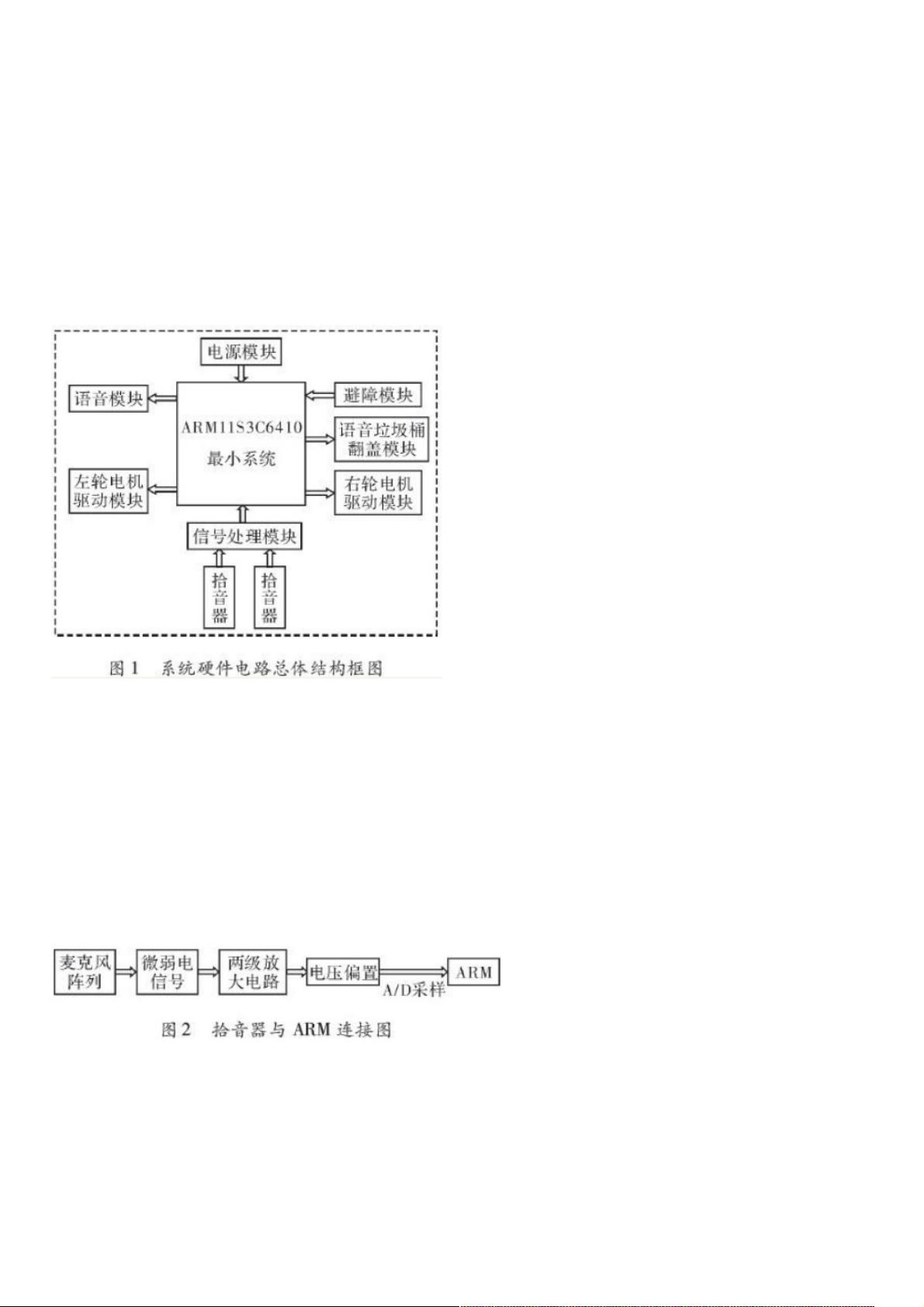
户发出的声音指令,自动行驶到用户所在 地。系统硬件电路总体结构框图如图1所示,包括电源模块、ARM最小系统、声源
定位模块、语音识别模块、避障模块和电机驱动模块。
工作原理:首先通过语音识别模块识别出用户的呼叫命令,同时通过声源定位模块判断用户所处位置,再通过ARM产生驱动
电机的PWM信号,利用电机驱动模块 驱动垃圾桶向声源方向行驶,并在行进过程中,利用避障模块自行避开障碍物。同时,
该设计还支持用户对垃圾桶前、后、左、右行驶或打开、关闭垃圾桶盖等语音 控制。
1.1 电源模块
系统所有模块和控制器都需要+5 V的工作电压,采用锂电池进行供电,并用LM2576S-5稳压芯片将电压稳定在+5 V,然后通
过稳压源LM1117-33和LM1117-18为S3C6410芯片3.3 V和1.8 V电压。
其余语音芯片UDA1341TS、拾音器的5 V供电、红外避障、直流电动机均为+5 V供电。
1.2 声源定位模块
声源定位模块主要包括拾音器构成的麦克风阵列和信号处理单元,如图2所示。
系统中麦克风阵列选用2个拾音器来实现,其监听范围为30~50 m2。由于拾音器所拾取的声音信号太小,易受环境噪声影
响,因此有必要对声音信号进行预处理,通过信号调理单元的处理,使其能够满足系统要求。为满足拾音 器所得到的微弱电
信号进行放大,系统采取两级放大电路。又由于A/D模块不能采集负电压信号,因此需要对放大后的电信号进行偏置,使其不
出现负电压,便于 ARM采样,使其输出的误差更小。
1.3 语音识别模块
设计采用 Philips公司UDA1341TS专用的语音处理芯片,能对语音实现放大、滤波、采样、A/D或D/A转换及进行数字语音处
理功能,并且支持璐总线数 据格式,与ARM芯片S3C6410内置IIS总线接口配合使用。ARM芯片上内置的IIS接口不但能够读
取IIS总线上的数据,为FIFO数据提供 DMA的传输模式,而且可以同时传输和接收数据。UDA1341TS对所采集的语音信号进
行采集和编码,由DTW模型算法进行模板训练,并将训练结果存储 在Flash中以便于在语音信号识别阶段读取模板。在语音信
号识别阶段,将输入的语音信号经过音频数字信号编译码器UDA1341 TS处理后,通知S3C6410嵌入式Linux操作系统,与保
下载后可阅读完整内容,剩余4页未读,立即下载
2023-01-24 上传
2021-09-21 上传
2021-05-20 上传
点击了解资源详情
2021-07-12 上传
2021-07-24 上传
2020-06-13 上传

weixin_38601390
- 粉丝: 4
- 资源: 910
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
