"基于双目立体视觉的三维重建方法及实现流程"
需积分: 0 37 浏览量
更新于2024-01-23
收藏 2.18MB PPT 举报
基于双目视觉的三维重建方法是一种利用双目立体视觉图像进行三维重建的技术。该方法包括了基于图像的三维重建和基于halcon下实现的方法。
基于图像的三维重建主要包括以下几个步骤:
1. 摄像机标定和相机畸变:首先对摄像机进行标定,获取摄像机的内参和外参,以及相机的畸变参数。这些参数用于后续的点云生成和三维建模。
2. 双目立体原理:利用双目立体摄像机的原理,通过对左右两个摄像机采集的图像进行处理,可以得到视差图。视差图是表示左右两个图像中对应像素点之间的视差关系的灰度图。
3. 特征抽取与特征匹配:从左右两个图像中抽取特征点,并进行特征匹配。特征点的选择通常考虑稳定性和唯一性。
4. 三维空间点定位:通过利用特征点和视差信息,可以计算出三维空间中对应特征点的位置。
5. 表面几何建模:通过对三维空间点进行处理和优化,可以生成点云模型。点云模型是表示物体表面形状的离散点集合。
6. 纹理映射:将点云模型的纹理信息映射到模型的表面上,使得三维模型具有真实的纹理效果。
另外,基于halcon的三维重建方法具体流程如下:
2.1 halcon双目标定:使用halcon库,对双目摄像机进行标定,获取相机的内参和外参,以及畸变参数。
2.2 opencv三维重建:利用opencv库,进行基于图像的三维重建。
3. opencv三维重建流程主要包括以下几个步骤:
- 基于立体视觉的三维重建流程(未考虑畸变的流程)
- 原始图像
- 摄像机内参和位姿关系
- 摄像机标定
- 特征点
- 特征点对
- 特征匹配
- 特征点检测
- 对极线约束
- 空间点定位
- 点云模型
- 表面几何重建
- 可见外壳
- 纹理映射
- 三维模型
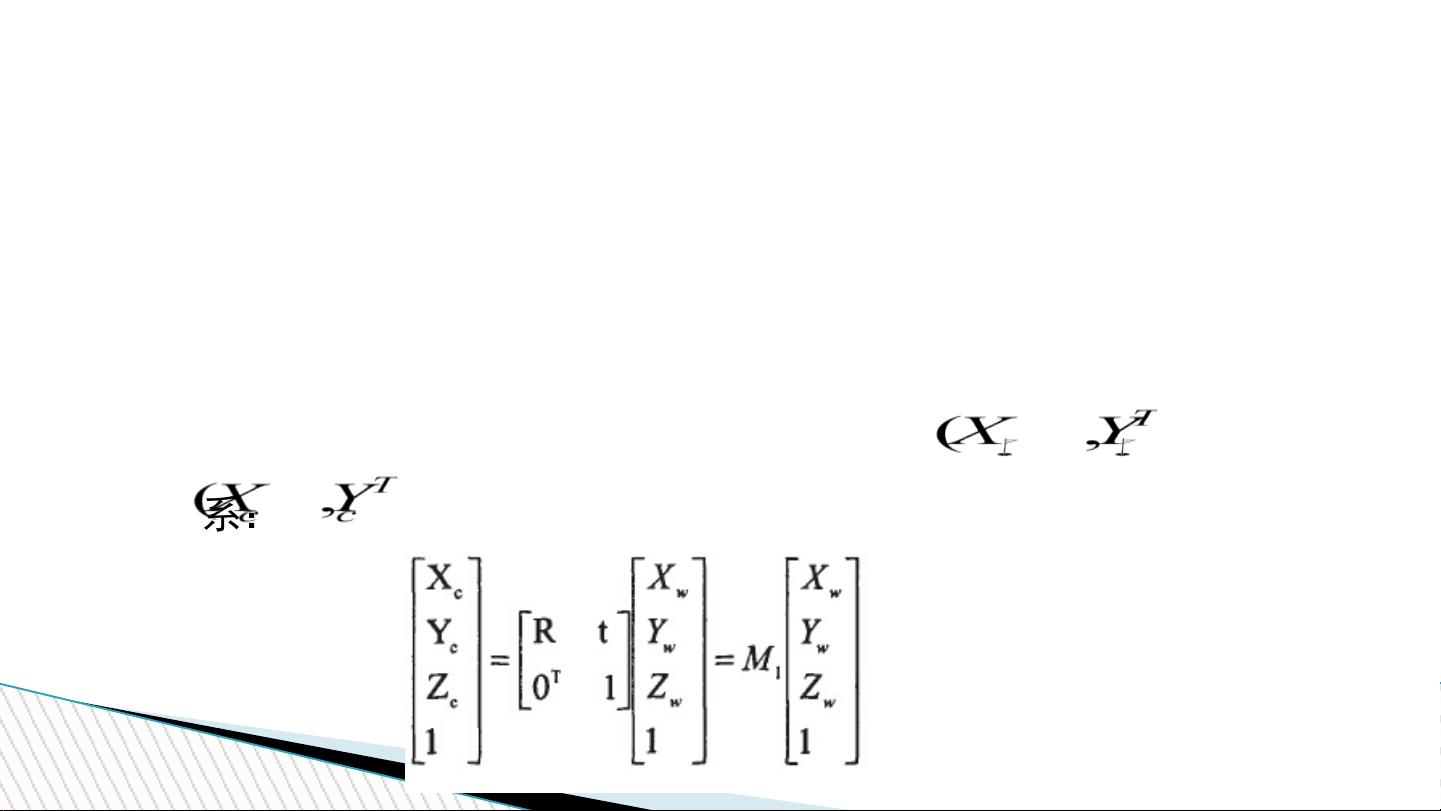
在摄像机标定中,定义了摄像机定标的几何意义和四个坐标系,包括世界坐标系、摄像机坐标系、图像坐标系和像素坐标系。摄像机定标是通过实验和计算得到的过程,通过计算三维空间中物体的几何信息,实现重建和识别物体。
综上所述,基于双目立体视觉的三维重建方法涵盖了摄像机标定、特征点提取与匹配、三维空间点定位、表面几何建模等关键步骤,并可以通过halcon和opencv等工具进行实现。这种方法可以广泛应用于计算机视觉、机器人以及虚拟现实等领域。
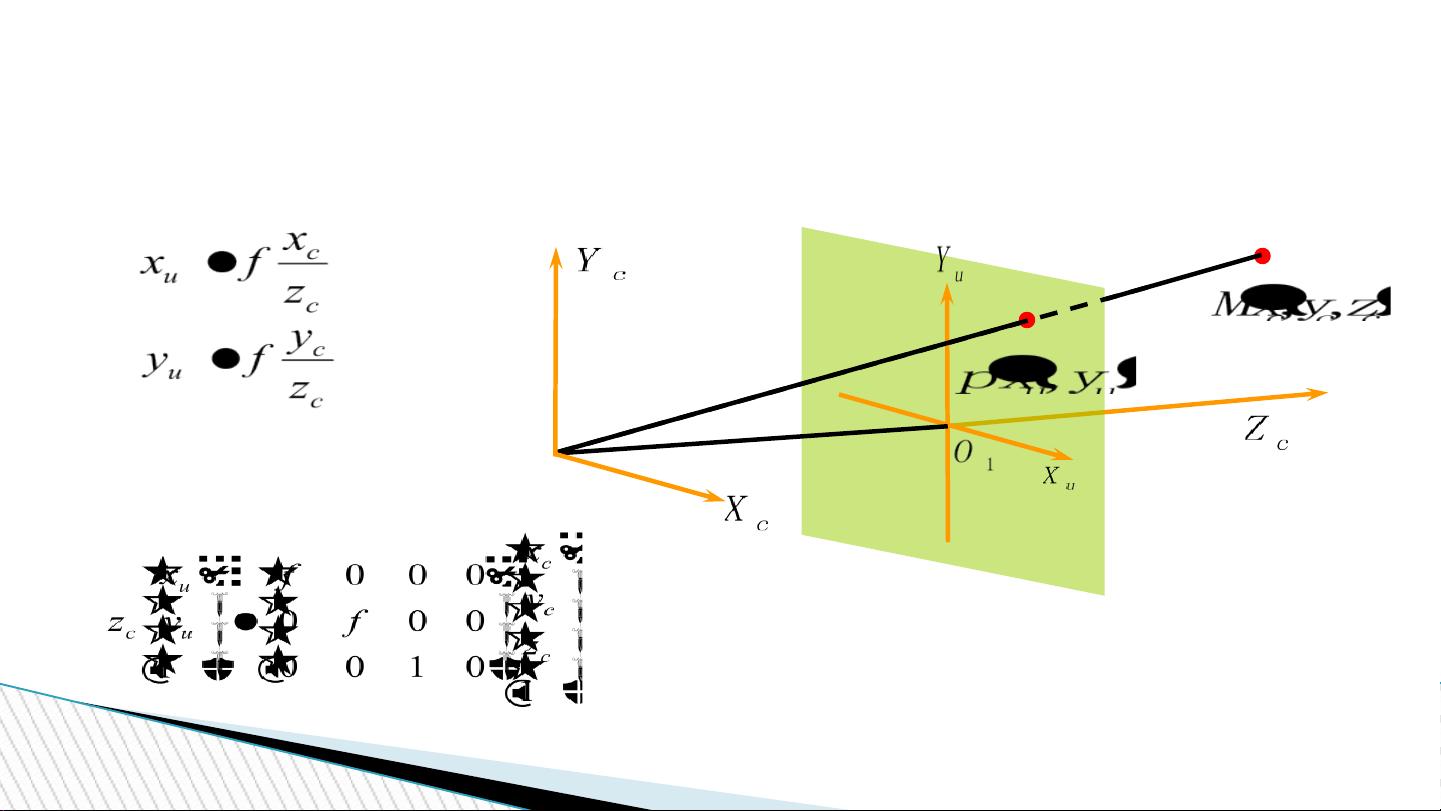
写成齐次坐标形式为
o
f
b、中心透视投影模型
剩余40页未读,继续阅读
208 浏览量
109 浏览量
3364 浏览量
2024-06-20 上传
1196 浏览量
349 浏览量
点击了解资源详情

宇宙研究小组
- 粉丝: 483
- 资源: 21
 我的内容管理
展开
我的内容管理
展开







最新资源
- SQL里单双引号使用区别
- JavaScript新资源.pdf
- 高性能计算并行编程技术—MPI并行程序设计
- Struts快速学习指南
- 六级词汇对考研非常有用
- Beginning Mac OS® X Tiger™ Dashboard Widget Development
- ARM Architecture Reference Manual
- PoCoOverview The C++ Portable Components
- PB程序开发工程规范
- 俄罗斯方块的关键代码
- MySQL(网络数据库指南)
- 计算机操作系统(汤子瀛)习题答案.pdf
- MYSQL(网络数据库指南)
- 贪吃蛇关键代码(C#)
- 企业架构――不断演变的企业架构师角色(第一部分)
- abap中文帮助和编程入门
