PLC控制步进电机技术解析:西门子系统应用
版权申诉
180 浏览量
更新于2024-07-20
收藏 1.92MB PDF 举报
"PLC怎样控制步进电机(西门子).pdf"
本文主要讨论了如何使用西门子PLC来控制步进电机,步进电机作为一种将电脉冲转化为精确角位移的执行机构,广泛应用于开环数控系统中。步进电机的转动基于输入脉冲的数量和频率,通过改变这两个参数可以实现调速和精确控制角位移。
步进电机主要分为三种类型:
1. 永磁式步进电机:通常为两相,其转矩和体积较小,常见的步进角为7.5度或15度。这种电机效率较高,但扭矩相对较小。
2. 反应式步进电机:通常为三相,能提供较大的转矩输出,但步进角一般为1.5度,同时伴随较大的噪声和振动。
3. 混合式步进电机:结合了永磁式和反应式的特性,有两相和五相之分。两相步进电机的步进角一般为1.8度,而五相电机的步进角则为0.72度,由于其精度和性能的平衡,应用最为广泛。
在西门子PLC控制步进电机的过程中,通常会涉及到以下几个关键步骤:
1. **配置PLC**:首先,需要在PLC中设置合适的硬件接口,连接步进电机驱动器,确保两者之间的通讯协议匹配。
2. **编程**:使用西门子的编程软件(如Step 7或TIA Portal)编写控制程序。编程时,需要定义脉冲生成和方向控制的逻辑,以及可能的加速和减速曲线。
3. **脉冲控制**:PLC会产生脉冲序列,这些脉冲被送至步进电机驱动器,驱动器根据脉冲频率和极性来决定电机的转动速度和方向。
4. **位置控制**:通过设定脉冲计数,PLC可以精确控制电机的旋转角度。例如,要使电机转动90度,只需发送相应数量的脉冲。
5. **速度控制**:通过改变脉冲的频率,可以实现步进电机的速度调节。频率越高,电机转动越快;反之,则越慢。
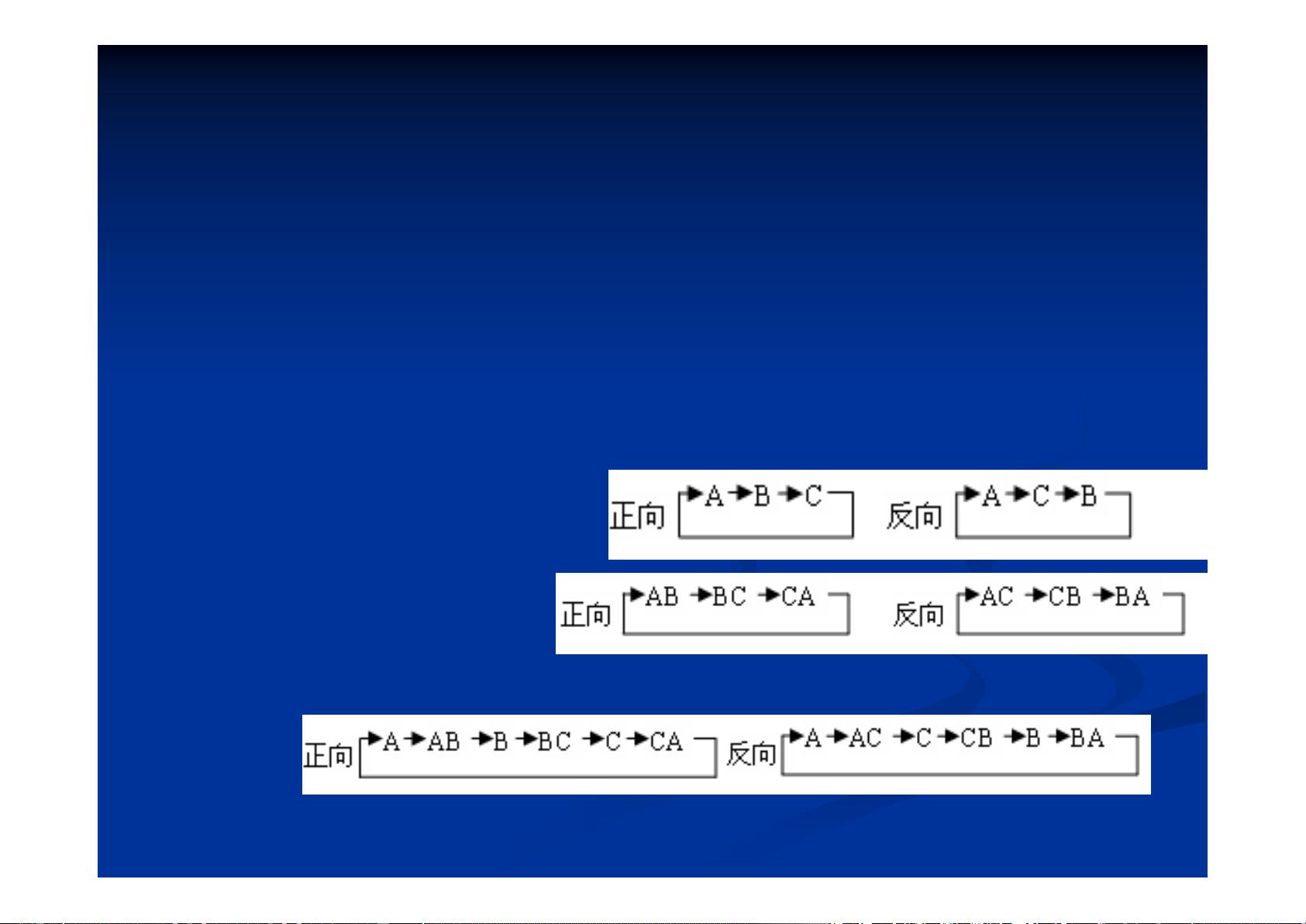
6. **方向控制**:改变脉冲的极性或顺序,可以改变电机的转动方向。
7. **加减速控制**:为了减少电机的振动和提高定位精度,通常需要在启动和停止时采用平滑的加减速过程,这可以通过在PLC程序中设置加减速曲线来实现。
8. **故障处理**:在PLC程序中加入故障检测和处理机制,如过载保护、电机失步检测等,以确保系统的稳定性和安全性。
利用西门子PLC控制步进电机,需要深入了解电机的特性和PLC的编程原理,通过精确的脉冲控制和位置控制,能够实现高精度的运动控制,满足各种工业自动化的需求。在实际应用中,还需要考虑系统的实时性、稳定性和抗干扰能力,以确保系统的高效运行。

步进电机主要有以下特点
步进电机主要有以下特点
�
�
4
4
.步进电机低速时可以正常运转,但若高于一定
.步进电机低速时可以正常运转,但若高于一定
速度就无法启动,并伴有啸叫声。
速度就无法启动,并伴有啸叫声。
步进电机有一个技术参数:空载启动频率,即步
步进电机有一个技术参数:空载启动频率,即步
进电机在空载情况下能够正常启动的脉冲频率,
进电机在空载情况下能够正常启动的脉冲频率,
如果脉冲频率高于该值,电机不能正常启动,可
如果脉冲频率高于该值,电机不能正常启动,可
能发生丢步或堵转。在有负载的情况下,启动频
能发生丢步或堵转。在有负载的情况下,启动频
率应更低。如果要使电机达到高速转动,脉冲频
率应更低。如果要使电机达到高速转动,脉冲频
率应该有加速过程,即启动频率较低,然后按一
率应该有加速过程,即启动频率较低,然后按一
定加速度升到所希望的高频(电机转速从低速升
定加速度升到所希望的高频(电机转速从低速升
到高速)。
到高速)。
www.plcworld.cn



剩余120页未读,继续阅读
1736 浏览量
1346 浏览量
874 浏览量
2021-08-08 上传
2021-08-08 上传
489 浏览量
105 浏览量
2021-08-08 上传

电动汽车控制与安全
- 粉丝: 276
- 资源: 4186
 我的内容管理
展开
我的内容管理
展开







最新资源
- 电信设备-基于手机信令数据的出行者职住地识别与出行链刻画方法.zip
- atom-ide-deno:deno对Atom-IDE的支持
- torch_sparse-0.6.2-cp36-cp36m-linux_x86_64whl.zip
- priceGame
- PsynthJS:用于在 Psymphonic Psynth 中生成图形的开源库
- Arca:Projeto do7ºperiodo
- java并发.rar
- 企业文化创新(4个文件)
- kdit:[镜像]-由Kotlin编写并由JavaFX支持的基于短键的简约文本编辑器
- 播客
- 珍爱生命,创建平安校园演讲稿
- NoSpoilTwi-crx插件
- 取EXE程序图标ICO.rar
- Row-oriented-Tuple-Indexer:一个库,用于构建常规的数据库数据结构,例如page_list(数据页的链接列表),b_plus_tree和hash_table
- Hadoop-Analytics---RHadoop
- torch_spline_conv-1.2.0-cp38-cp38-linux_x86_64whl.zip
