Sherlock多线程运行配置指南
需积分: 19 30 浏览量
更新于2024-07-09
收藏 1.81MB PDF 举报
"sherlock实现多线程运行的方法"
在计算机视觉领域,Sherlock是一款由Teledyne DALSA公司开发的强大图像处理软件。本资源详细介绍了如何利用Sherlock实现多线程运行,特别是在多相机配置环境下,以提高图像采集和处理的效率。多线程技术在处理大量数据流时尤为重要,因为它能同时处理多个任务,有效利用系统资源,减少程序的响应时间。
首先,硬件配置是关键。为了实现多线程运行,你需要至少两台相机、三条千兆网线、一个千兆交换机、一个Sherlock加密狗以及一台运行32位Windows 7操作系统的PC(尽管其他版本的操作系统和更高版本的Sherlock软件也可能适用)。在安装Sherlock时,应遵循默认路径,确保软件和驱动安装正确。
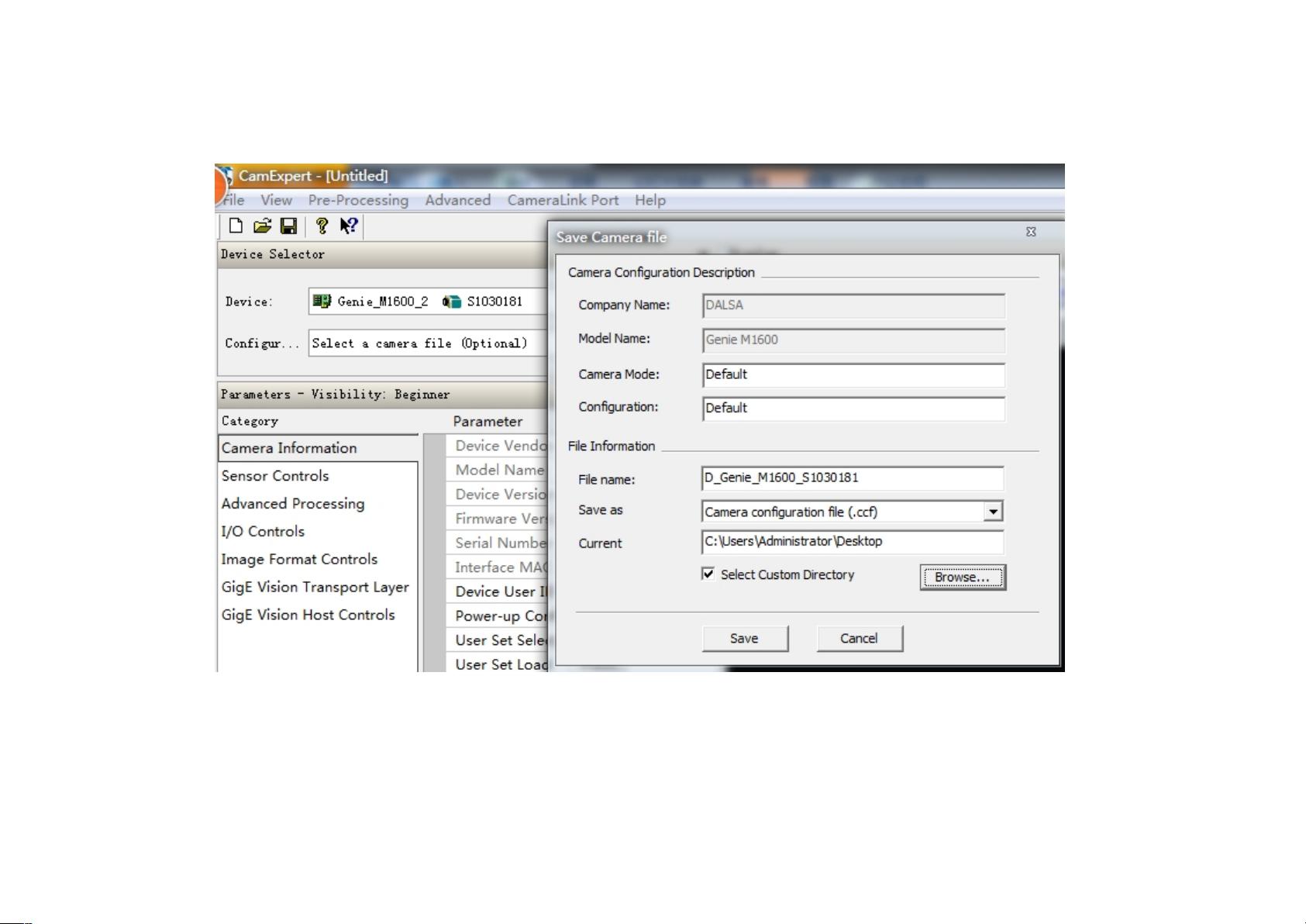
接下来,为每个相机创建单独的配置文件。这是通过Sherlock软件进行的,配置文件需保存在特定文件夹内,并用相机序列号来命名,以便后续识别。例如,可以将配置文件命名为"Camera1.ini"和"Camera2.ini"。
然后,逐个连接和配置相机。先连接一个相机,启动相机配置文件导入程序"Sapera Acquisition Wizard"。导入当前相机的配置文件,并将其另存为"SaperaLTDrv1.ini"。确保配置文件与实际连接的相机匹配,并保存在默认路径下。
接着,断开已配置的相机,连接第二个相机,重复上述步骤,将第二个相机的配置文件另存为"SaperaLTDrv2.ini"。这样,两个相机都有了自己的配置文件,分别对应"SaperaLTDrv1.ini"和"SaperaLTDrv2.ini"。
最后,当两个相机都正常连接并配置好后,可以通过命令行启动Sherlock,利用多线程加载两个相机的配置。在Windows 7的搜索栏中输入特定命令,如"C:\Program Files\Teledyne DALSA\Sherlock\Bin\IpeStudio.exe -acq:Drivers1.ini-load:t.ivs",这将打开一个Sherlock程序窗口,显示第一个相机(1号相机)的图像。通过修改命令中的配置文件名,可以切换到另一个相机。
Sherlock通过多线程技术实现了对多个相机的并发控制,从而提高了图像处理的效率和实时性。这种方法在需要同时处理多个数据源的计算机视觉应用中尤为有用,例如工厂自动化、交通监控或科学研究等领域。理解并掌握这种多线程设置方法对于优化Sherlock在多相机环境下的性能至关重要。
第二个相机配置文件
剩余14页未读,继续阅读
2019-09-03 上传
2018-12-14 上传
2023-09-20 上传
2023-09-07 上传
2023-08-05 上传
2023-10-09 上传
2023-11-30 上传
2023-08-05 上传

nolonger
- 粉丝: 17
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
