深度解析图模型:机器学习与模式识别的关键工具
需积分: 0 38 浏览量
更新于2024-07-25
收藏 2.97MB PDF 举报
图模型(Graphical Models)是统计学和机器学习领域中一种强大的工具,它们通过图形结构来表示变量之间的依赖关系,特别在处理复杂的数据集时展现出显著的优势。作者Michael I. Jordan在2004年发表于《统计科学》(Statistical Science)第19卷第1期的文章中,深入探讨了图模型的概念、理论基础及其在机器学习中的实际应用。
图模型的核心思想是使用无向图或者有向图来代表随机变量的联合分布。在这个框架下,节点代表变量,边则反映了变量间的条件独立性。无向图中的边表示两个变量在给定其他所有变量的条件下是独立的,这种结构被称为马尔科夫随机_field (Markov Random Field, MRF),它在许多模式识别任务如图像处理、自然语言处理和计算机视觉中非常有用。有向图则更精确地刻画因果关系,如贝叶斯网络(Bayesian Networks),它们在序列数据和动态系统建模中扮演关键角色。
在机器学习中,图模型被用于概率推理、变量筛选、参数估计以及预测。例如,通过贝叶斯网络,可以进行高效地后验推理,即在给定观测数据后更新模型参数;而在MRF中,利用能量函数和最大似然估计方法,可以求解复杂的优化问题,如图像分割或自然语言解析。
文章中提到的《Statistical Science》期刊是统计学界的重要出版物,发表的这篇论文不仅介绍了图模型的基础理论,还展示了其在实际问题中的应用案例和最新研究进展。通过JSTOR这一数字图书馆平台,读者可以访问这篇论文,了解其详细内容,并遵循JSTOR的使用条款,以便于进一步学习和研究。
图模型是机器学习中不可或缺的一部分,其直观的图形表示方式和强大的表达能力使其在处理各种复杂数据和解决实际问题中表现出色。理解并掌握图模型,对于从事机器学习和模式识别领域的专业人士来说,是提升数据分析技能和解决问题能力的关键。
142
M. I. JORDAN
K
Zi
X
zCi
N~
Ui
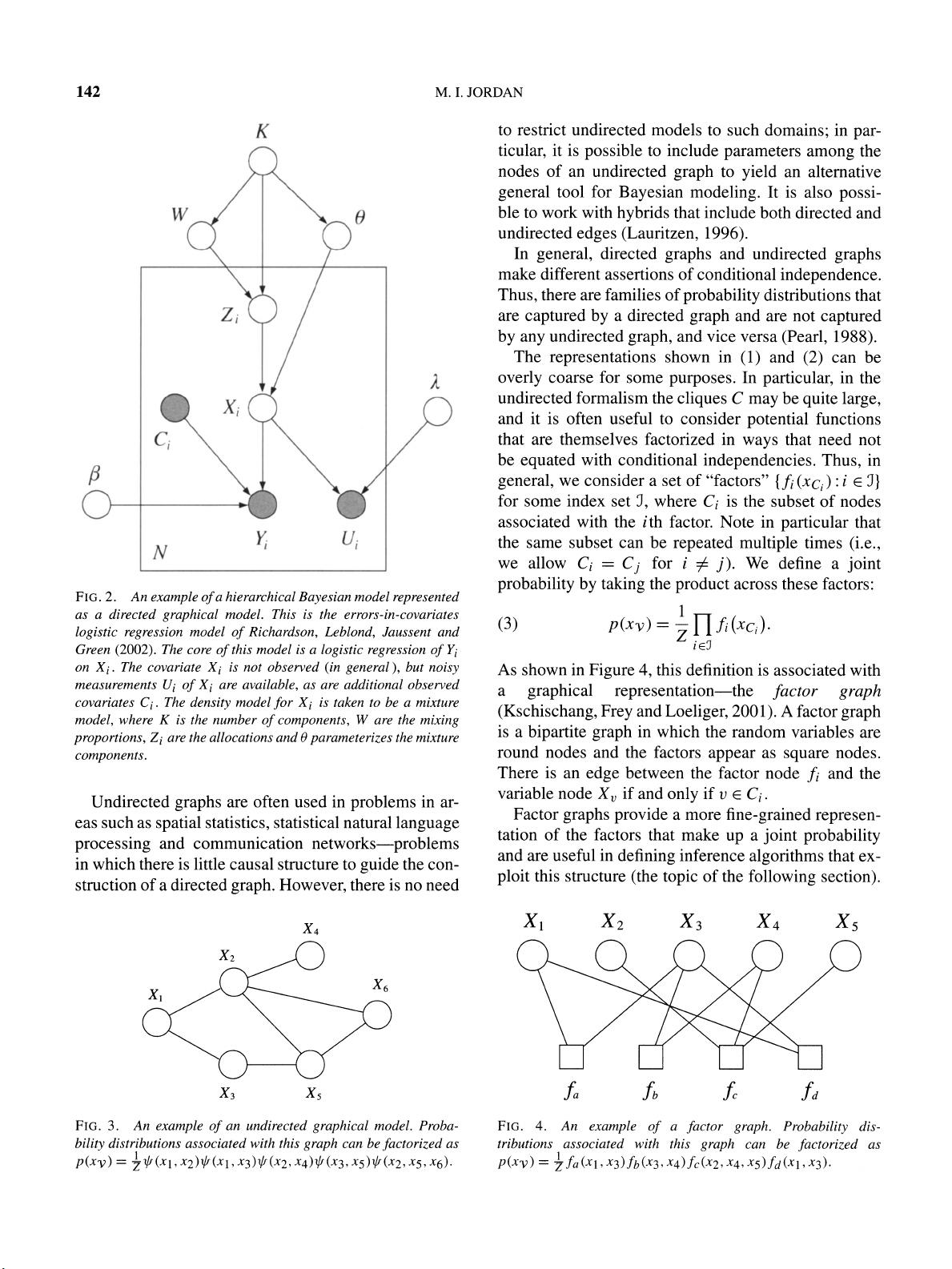
FIG. 2. An
example
of
a hierarchical
Bayesian
model
represented
as a directed
graphical
model. This is the
errors-in-covariates
logistic regression
model
of
Richardson,
Leblond,
Jaussent and
Green
(2002).
The core
of
this model is a
logistic regression of
Yi
on
Xi.
The covariate
Xi
is not observed
(in
general),
but
noisy
measurements
Ui
of
Xi
are
available,
as are additional
observed
covariates
Ci.
The
density
model
for
Xi
is taken to
be a mixture
model,
where K
is the number
of components,
W
are the
mixing
proportions,
Zi
are the allocations and
0
parameterizes
the mixture
components.
Undirected
graphs
are often used
in
problems
in
ar-
eas such as
spatial
statistics,
statistical natural
language
processing
and communication
networks-problems
in
which there is little causal structure to
guide
the
con-
struction of a directed
graph.
However,
there is no
need
to restrict undirected
models to such
domains;
in
par-
ticular,
it is
possible
to
include
parameters
among
the
nodes of an
undirected
graph
to
yield
an
alternative
general
tool
for
Bayesian modeling.
It is also
possi-
ble
to work with
hybrids
that include both
directed
and
undirected
edges
(Lauritzen,
1996).
In
general,
directed
graphs
and
undirected
graphs
make different
assertions of
conditional
independence.
Thus,
there are
families of
probability
distributions that
are
captured by
a directed
graph
and are not
captured
by any
undirected
graph,
and
vice versa
(Pearl,
1988).
The
representations
shown in
(1)
and
(2)
can be
overly
coarse for
some
purposes.
In
particular,
in
the
undirected formalism the
cliques
C
may
be
quite
large,
and it is often useful to
consider
potential
functions
that are themselves
factorized
in
ways
that need
not
be
equated
with
conditional
independencies.
Thus,
in
general,
we consider a set
of
"factors"
{
fi
(xc)
: i
E
J}
for some index set
J,
where
Ci
is
the subset of
nodes
associated
with
the ith factor.
Note
in
particular
that
the same subset can
be
repeated
multiple
times
(i.e.,
we allow
Ci
=
Cj
for i
0 j).
We define a
joint
probability by taking
the
product
across
these factors:
1
(3) p(xv)
=-
Z
fi
(xc)
As shown in
Figure
4,
this
definition is
associated with
a
graphical representation-the factor
graph
(Kschischang,
Frey
and
Loeliger,
2001).
A
factor
graph
is a
bipartite graph
in
which
the random variables
are
round nodes and the
factors
appear
as
square
nodes.
There is an
edge
between the
factor node
fi
and the
variable node
X,
if
and
only
if
v
Ci
.
Factor
graphs provide
a more
fine-grained
represen-
tation of the factors
that make
up
a
joint
probability
and are useful
in
defining
inference
algorithms
that ex-
ploit
this
structure
(the
topic
of the
following
section).
X4
X2
XX
X6
X3
X5
FIG. 3.
An
example of
an undirected
graphical
model. Proba-
bility
distributions associated with this
graph
can be
factorized
as
p(xv)
=
I
*(x
1,
x2)
*
(xa
,
x3)
(x2,
x4)
(x3, x5)
*
(x2,
x5, x6).
X1
X2
X3
X4
X5
fa
fb
ffd
FIG. 4. An
example of
a
factor
graph.
Probability
dis-
tributions
associated with this
graph
can be
factorized
as
p(xv)-=
7
fa
(xl,
x3)fb(x3, x4)fc(x2,
x4,
x5)fd(xl, x3).
剩余16页未读,继续阅读
2022-11-25 上传
2024-09-24 上传
2014-08-25 上传
2023-10-05 上传
2020-08-23 上传
189 浏览量
2018-12-11 上传

Justdoit886
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
