Matlab仿真实验:状态空间模型与系统响应分析
需积分: 10 130 浏览量
更新于2024-09-02
收藏 903KB DOC 举报
"本次实验是关于系统建模的仿真实验,主要利用MATLAB的Simulink工具进行。实验目标是掌握用MATLAB建立仿真模型和Simulink构建系统模型。实验内容包括创建多项式模型、零极点模型和状态空间模型,并通过观察零极点图、冲激响应、阶跃响应和频率响应来分析系统特性。实验还涉及到改变系统极点和零点对响应的影响,以及使用Simulink进行可视化仿真。"
在系统建模中,状态空间模型是一种重要的表示方式,它以矩阵的形式描述系统动态,适用于处理多输入多输出(MIMO)系统。状态空间模型的优势在于其直接性,便于数值计算和求解,同时也便于处理系统的初值问题。此外,状态空间模型有助于分析系统的可观测性和可控性,这对于理解和设计控制系统至关重要。
实验中,首先建立了系统多项式模型,然后将其转换为零极点模型和状态空间模型。在MATLAB中,`tf`函数用于创建传递函数模型,`zpk`函数将传递函数模型转换为零极点增益模型,而`ss`函数则将模型转换为状态空间模型。零极点图揭示了系统动态行为的关键信息,例如稳定性、响应速度等。
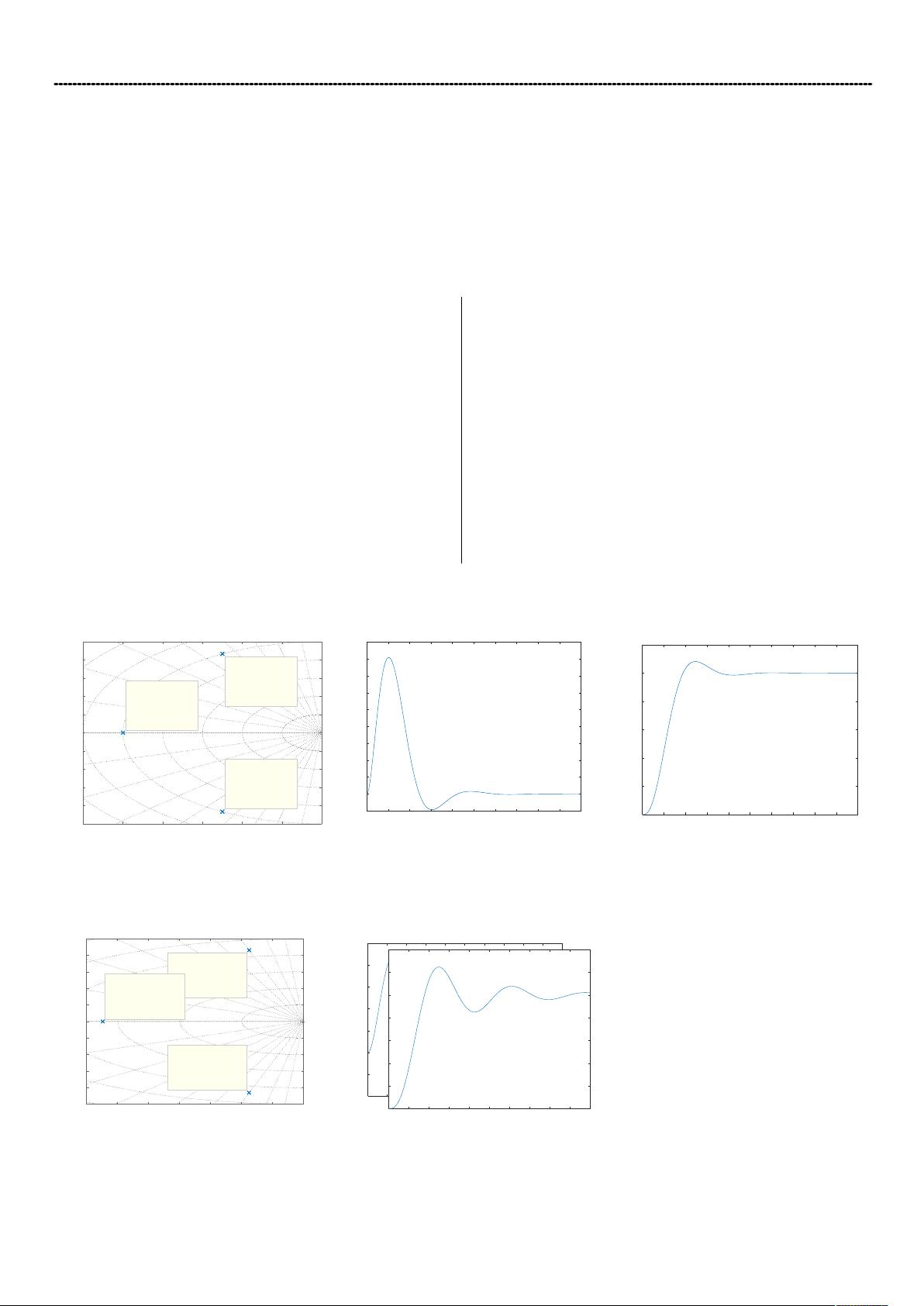
实验通过改变系统极点位置,观察冲激响应和阶跃响应的变化,展示了极点位置对系统动态特性的影响。例如,当极点更接近虚轴时,系统的响应峰值会增大,响应时间也会增加。反之,如果极点虚部的绝对值较大,响应会更快但振荡更剧烈。这反映了控制理论中的基本原理,即极点的位置决定了系统的稳定性和响应速度。
Simulink作为MATLAB的一个图形化仿真环境,可以直观地构建和仿真复杂系统。在实验中,使用Simulink构建系统模型,并观察了冲激响应和阶跃响应,进一步验证了理论分析。Simulink的可视化界面使得系统行为的分析变得更加直观和易懂,对于教学和工程实践都有很大的帮助。
这个实验提供了一个理解系统建模、系统特性分析以及Simulink仿真的综合平台,通过实际操作加深了对系统动态行为的理解,为后续的控制系统设计和优化奠定了基础。
实验名称: 实验三 系统建模的仿真实验
一、实验目的
1、掌握 Matlab 建立仿真模型的方法;
2、会用 simulink 建立系统模型。
二、实验过程及分析
实验 1
(1)脚本
num=[];
den=[1 2 2 1];
sys1=tf(num,den);%建立系统多项式模型
sys2=zpk(sys1);%转换为零极点模型
sys3=ss(sys1);%转换为状态空间模型
figure(1);pzmap(sys1);
grid on;%画出零极点图,并添加网格
t=0:0.02:20;
w=0:0.02:5;
h=impulse(num,den,t);
figure(2);plot(t,h);
xlabel('time /s');
title('impulse response');
g=step(sys1,t);
figure(3);plot(t,g);
xlabel('time /s');
title('step response');
H=freqs(num,den,w);
figure(4);plot(w, abs(H));
xlabel('freqs/rad/s')
title('amplitude-frequency')
(2)运行结果
1、原系统
图 1-1 一号系统零极点图 图 1-2 一号系统冲激响应 图 1-3 一号系统阶跃响应
2、改变极点后的系统
图 1-4 二号系统零点图 图 1-5 二号系统冲激响应 图 1-6 二号系统阶跃响应
-1.2 -1 -0.8 -0.6 -0.4 -0.2 0
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.811.2
0.10.220.320.440.580.72
0.86
0.96
0.2
0.10.220.320.440.580.72
0.86
0.96
0.40.6
Pole-Zero Map
Real Axis (seconds
-1
)
Imaginary Axis (seconds
-1
)
System: sys1
Pole : -0.5 - 0.866i
Damping: 0.5
Overshoot (%): 16.3
Frequency (rad/s): 1
System: sys1
Pole : -0.5 + 0.866i
Damping: 0.5
Overshoot (%): 16.3
Frequency (rad/s): 1
System: sys1
Pole : -1
Damping: 1
Overshoot (%): 0
Frequency (rad/s): 1
0 2 4 6 8 10 12 14 16 18 20
time /s
0
0.2
0.4
0.6
0.8
1
1.2
step response
0 2 4 6 8 10 12 14 16 18 20
time /s
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
impulse response
-0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.6
0.8
1
0.88
0.280.38
0.68
0.88
0.280.38
0.68
0.060.120.20.52
0.060.120.20.52
0.2
0.4
0.6
0.8
1
0.2
0.4
Pole-Zero Map
Real Axis (seconds
-1
)
Imaginary Axis (seconds
-1
)
System: sys1
Pole : -0.176 + 0.861i
Damping: 0.2
Overshoot (%): 52.6
Frequency (rad/s): 0.879
System: sys1
Pole : -0.176 - 0.861i
Damping: 0.2
Overshoot (%): 52.6
Frequency (rad/s): 0.879
System: sys1
Pole : -0.648
Damping: 1
Overshoot (%): 0
Frequency (rad/s): 0.648
0 2 4 6 8 10 12 14 16 18 20
time /s
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
impulse response
0 2 4 6 8 10 12 14 16 18 20
time /s
0
0.2
0.4
0.6
0.8
1
1.2
1.4
step response
下载后可阅读完整内容,剩余6页未读,立即下载
点击了解资源详情
378 浏览量
点击了解资源详情
2021-10-11 上传
2022-06-25 上传
107 浏览量
2021-11-14 上传

scascs
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android开源项目合集:实用小工具与源码大全
- 轻松美化代码:sublime HTML-CSS-JS Prettify插件
- C#开发必备:常用类库全解析
- ASRock华擎H77M主板BIOS 1.60版升级要点解析
- 局部化脸部特征实时视频转变技术深度解析
- 数据存储解决方案与实践指南
- Laravel与Vue.js打造投票系统详解
- 掌握SublimeLinter:Sublime文本插件的安装与配置
- 实现单表增删改查的SSH框架整合教程
- C#实现两点间平行动态字体绘制方法
- LFM与巴克码组合信号MATLAB仿真分析
- 华擎Z87超频主板BIOS 1.70版升级详解
- Unreal Development Kit入门教程:创建塔防游戏
- Sublime Text 3的使用技巧与插件推荐
- 激光引导设备:救援与紧急疏散的技术革新
- Qt仿qq浮动弹窗插件封装及跨平台使用教程
