TwinCAT NC PTP新手教程V2.05:2014年官方推荐的自动化控制指南
TwinCAT NC PTP实用教程V2.05_2014_10_18.pdf 是一份针对TwinCAT NC(一款由德国贝克霍夫公司开发的基于PC的运动控制软件)的详尽教程,该教程的目的是帮助新手更好地理解和应用这款强大的技术。TwinCAT NC因其集成的灵活性和高性能,特别适合于工业自动化领域,特别是在伺服驱动系统控制方面,它提供了与伺服驱动器厂家软件工具(方式A)以及独立运动控制系统(方式B)相媲美的功能。
教程自2010年V5版本以来,经历了多次迭代更新,直至V2.05版本,反映了作者Lizzy Chen不断优化和完善的内容。版本历史表明,这份教程不仅涵盖了早期版本,如V1.07到V2.00,还包含了最新的技术进展,适应了产业机械自动化技术的发展和需求。
TwinCAT NC的独特之处在于它将PLC厂家的运动控制与通用性相结合,允许用户控制任意伺服驱动器和电机,而无需受制于单一制造商的产品。这种方式C(即使用PLC厂家的运动控制系统)避免了与驱动器厂商软件的特定兼容性问题,但可能限制了选择范围。相比之下,TwinCAT NC提供了更广泛的设备兼容性和更高的灵活性。
教程的核心内容包括但不限于以下几点:
1. TwinCAT NC的基础介绍,包括其在工业自动化中的角色和优势,如高精度和动态性能对提升生产效率的重要性。
2. 详细讲解如何通过TwinCAT NC进行伺服驱动器和电机的控制,包括通过厂家软件工具、独立运动控制系统以及PLC集成的方法。
3. 通信协议和技术细节,如如何处理PLC与伺服驱动器之间的数据交换,确保设备间的顺畅协作。
4. 实战教程和案例分析,让读者能够掌握如何在实际项目中应用TwinCAT NC进行高效控制和优化。
5. 提供最新版本(V2.05)的下载链接,便于读者获取最新技术和更新支持。
这份TwinCAT NC PTP实用教程是工业自动化工程师不可或缺的学习资料,特别是对于那些希望提升伺服驱动系统控制技能并寻求更加灵活解决方案的工程师来说,它提供了一个全面且实用的学习平台。

TwinCAT NC PTP 实用教程 V2.05 2014.10.18
第 16 页 共 392 页 2014-10-18
本文纯属个人经验,非 Beckhoff 公司正式发行,如有疑问,请直接联系作者:BCGZ Lizzy Chen
1 TwinCAT NC PTP 系统概述
TwinCAT NC PTP 是 Beckhoff 公司的运动控制软件的名称,从字面来看,TwinCAT 是“The
Windows Control and Automation Technology”的缩写,即基于 Windows 操作系统的自动化控
制技术,而 NC PTP 是“Numerical Control Point To Point”的缩写,NC(Numerical Control)
是自控领域的一个专业术语,类似 MC(Motion Control),也指运动控制,NC PTP 就是点对
点的运动控制。
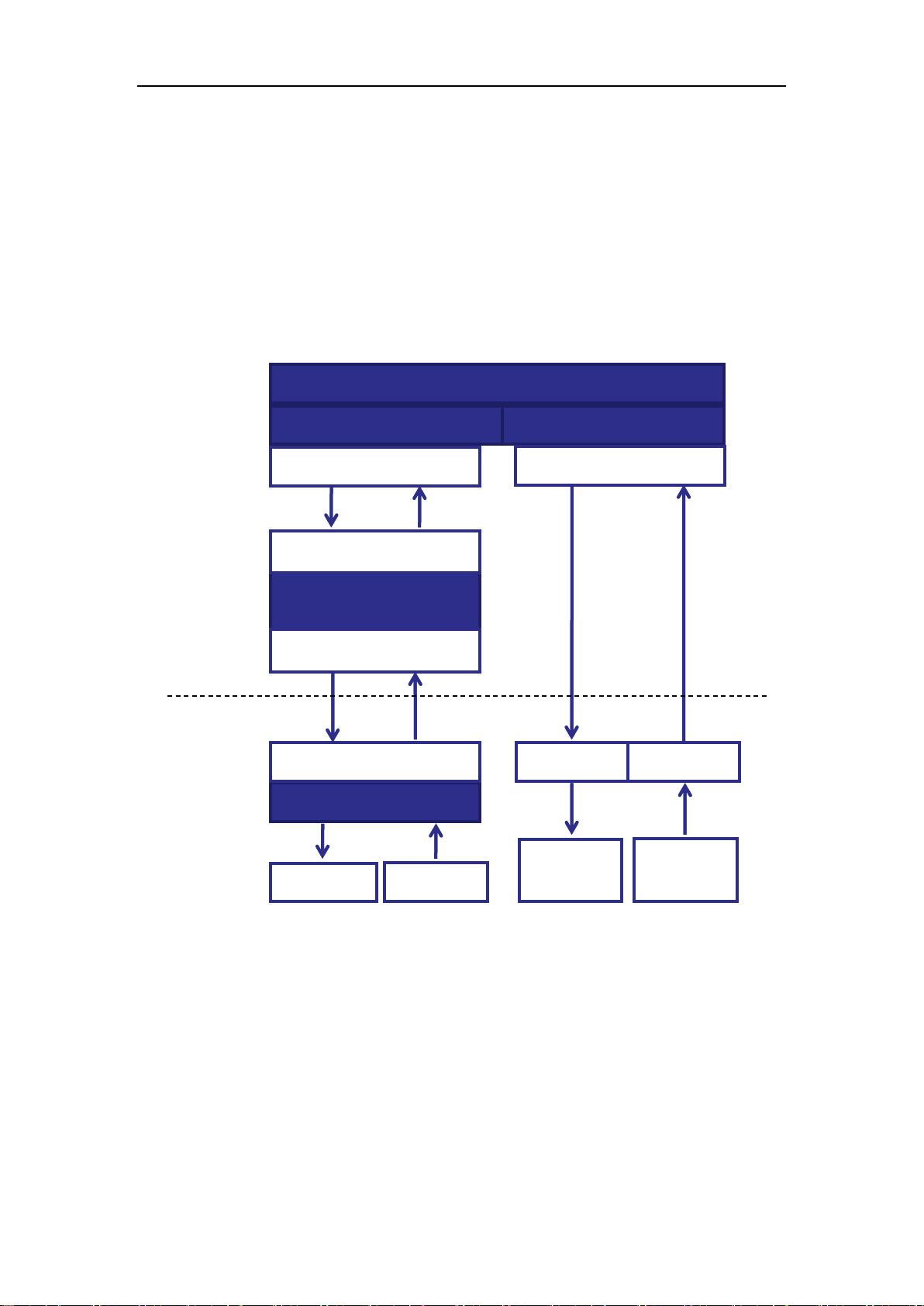
TwinCAT NC 是基于 PC 的纯软件的运动控制,它的功能与传统的运动控制模块、运动控制
卡类似。由于 TwinCAT NC 与 PLC 运行在同一个 CPU 上,运动控制和逻辑控制之间的数据
交换更直接、快速,因此 TwinCAT NC 比传统的运动控制器更加灵活和强大。TWINCAT NC
的另一个特点是完全独立于硬件,用户可以选择不同厂家的驱动器和电机,而控制程序不变。
程序的运动控制指令集遵循 PLC OPEN 组织关于运动控制功能块的定义规范 V1.0 和 V2.0。
TwinCAT NC 有 PTP 和 NC I 两个级别,PTP 即点对点控制方式,可控制单轴定位或者定速,
也可以实现两轴之间的电子齿轮、电子凸轮同步。在此基础上,Beckhoff 还提供 Dancer
Control(张力控制)、Flying Saw(飞锯)、FIFO(先入先出)等多轴联动方式。此外,用户
还可以在 PLC 程序中编写位置发生器,每个 PLC 周期都计算目标位置、速度和加速度,并
发送给 TwinCAT NC 去执行。
而 TwinCAT NC I 除了能够实现 TwinCAT NC PTP 的所有功能之外,还可以执行 G 代码,实
现多轴之间的直线、圆弧和空间螺旋插补。在本书中仅讨论 TwinCAT NC PTP 的原理和应用。



剩余391页未读,继续阅读
2019-12-26 上传
2020-03-30 上传
2015-10-13 上传
2018-07-24 上传
2018-01-12 上传
2023-07-30 上传
2019-07-31 上传

mingwushang
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Group3_Covid19_InfoCenter
- 基于stm32设计的光电门实验装置.zip(毕设/课设/竞赛/实训/项目开发)
- Test_QQMainView:通过 OC 实现“手机QQ” 主页面的侧滑菜单、视图联动
- SilentCode-JpegCodecs-master_jpg解码_jpegdecoderc++_
- sod2015:此项目是在博洛尼亚(2015年3月28日)#SOD2015组织的LOD黑客马拉松期间开发的。 作者@alemela和@giuseppefutia
- CATIA V5产品设计经典实例视频教程下载实例25 蜗杆-参数化.zip
- FrenchTech:HTML5工作坊-Gobelins阿讷西2年级
- omap_hwmod_2430_data.rar_嵌入式/单片机/硬件编程_Unix_Linux_
- laravel_projet_duo
- grrdemos:记录 GRR 演示的项目
- 一款纯css实现的小球在固定区域内碰撞的特效源码.zip
- 基于树莓派+opencv+stm32+ebox设计的大平板小球平衡系统.zip(毕设/课设/竞赛/实训/项目开发)
- AD73311_AD73311_
- labview_While.zip_LabView编程_Others_
- CATIA V5-6R2016快速入门进阶与精通视频教程下载ch13 CATIA工程图设计实际综合应用.zip
- jQuery.ddYMap:一个jQuery库,允许以简单的方式将Yandex.Maps呈现在页面上
